Figures & data
Figure 1. The compressor system with CCV actuator [Citation40].
![Figure 1. The compressor system with CCV actuator [Citation40].](/cms/asset/503771be-0ebf-4001-86a0-73f94297ff27/taut_a_2329503_f0001_oc.jpg)
Figure 2. Schematic of finite-time adaptive sliding mode control.
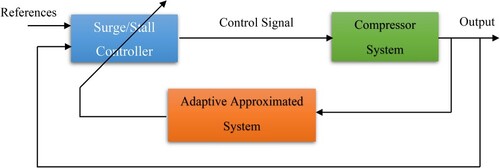
Figure 3. The compressor pressure in scenario 1.
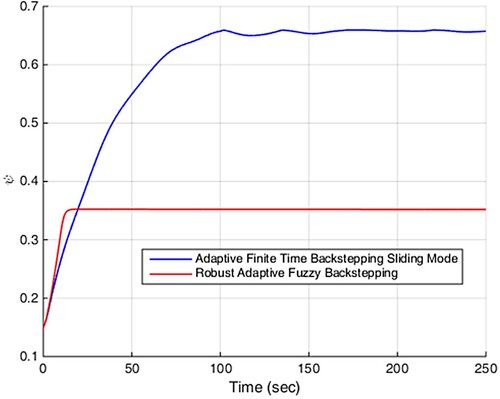
Figure 4. The compressor flow in scenario 1.
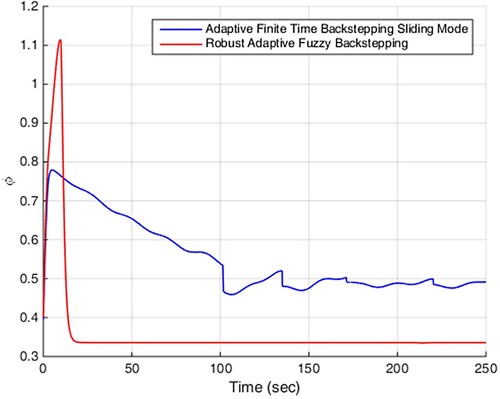
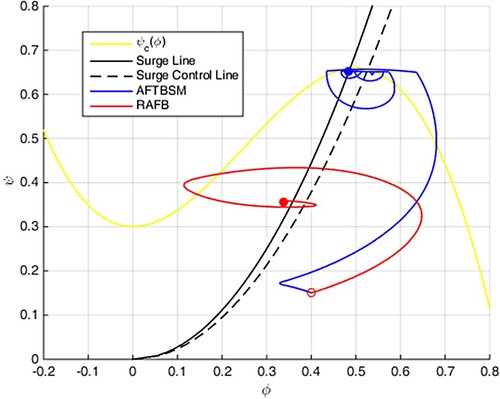
Figure 5. The compressor stall diagram in scenario 1.
Figure 6. The control signals in scenario 1.
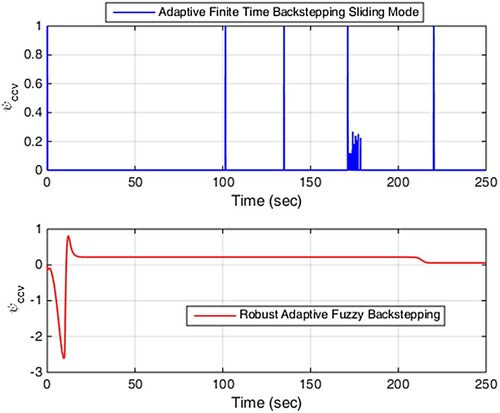
Figure 7. Compression system trajectories in scenario 1.
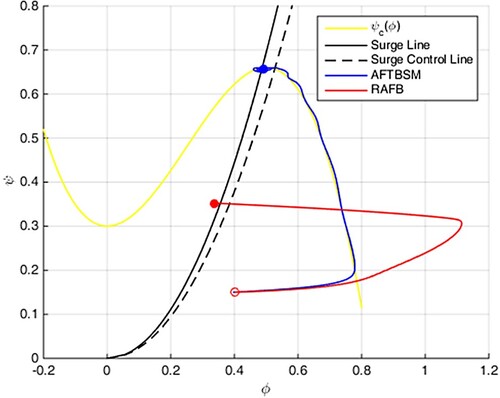
Figure 8. The compressor pressure in scenario 2.
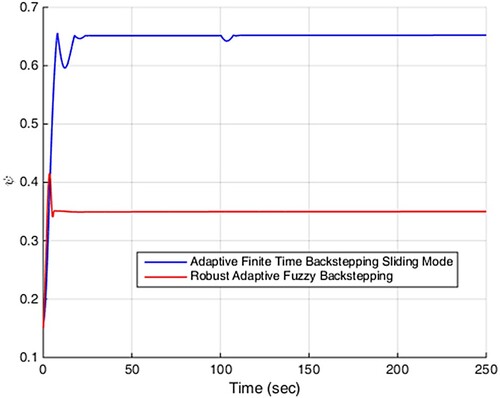
Figure 9. The compressor flow in scenario 2.
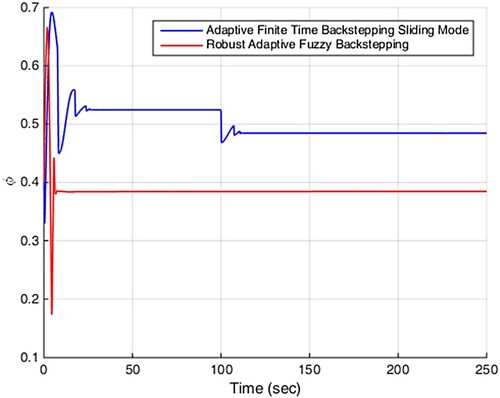
Figure 10. The compressor stall diagram in scenario 2.
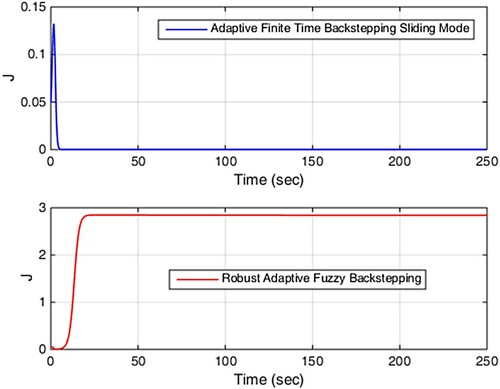
Figure 11. The control signals in scenario 2.
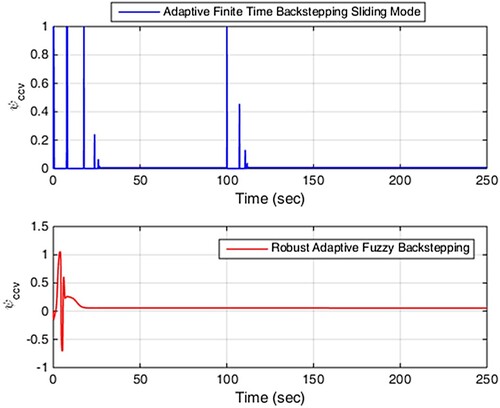
Figure 12. Compression system trajectories in scenario 2.
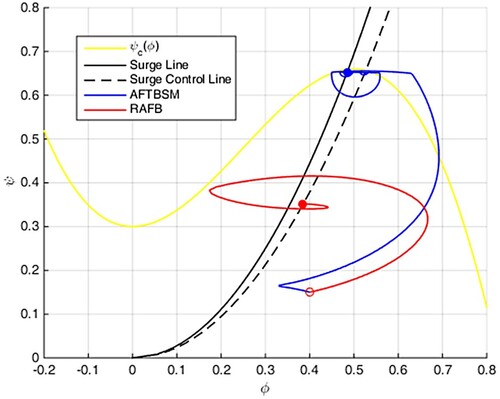
Figure 13. The compressor pressure in scenario 3.
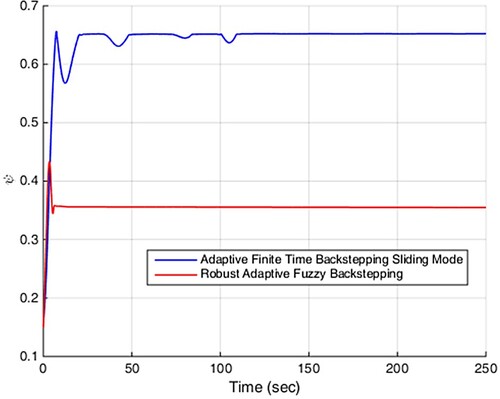
Figure 14. The compressor flow in scenario 3.
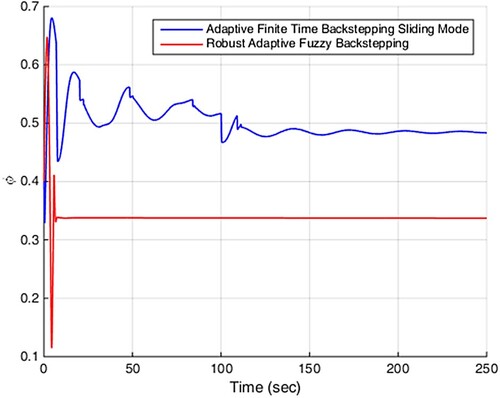
Figure 15. The compressor stall diagram in scenario 3.
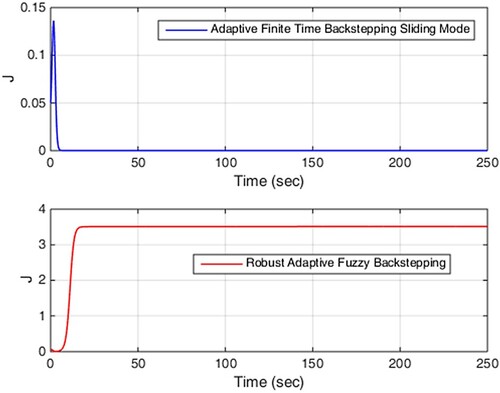
Figure 16. The control signals in scenario 3.
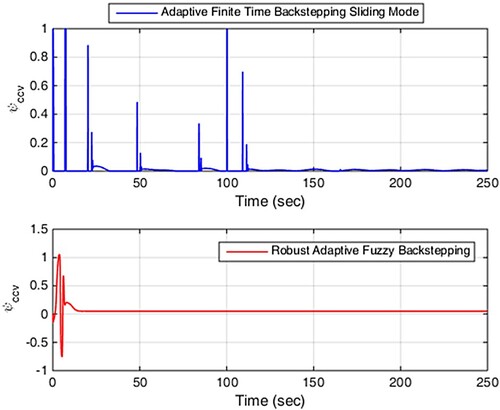
Figure 17. Compression system trajectories in scenario 3.