
Figures & data
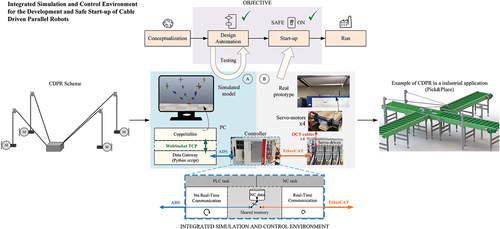
Figure 1. Under-constrained CDPR schematic view.
Figure 2. Closed-loop kinematics model of CDPR.
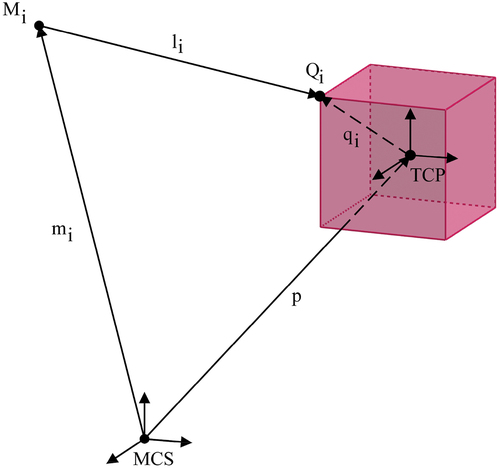
Table 1. Geometrical parameters of the CDPR.
Figure 3. Architecture of the proposed environment.
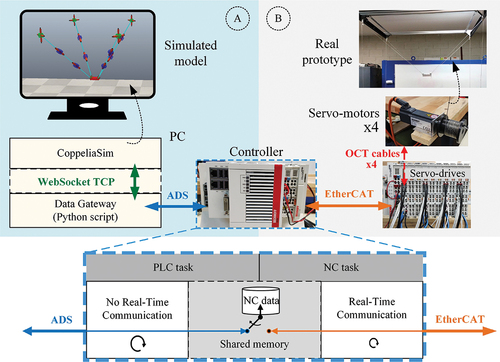
Figure 4. Under-constrained CDPR model in CoppeliaSim. a) tree of components. (b) 3D view.
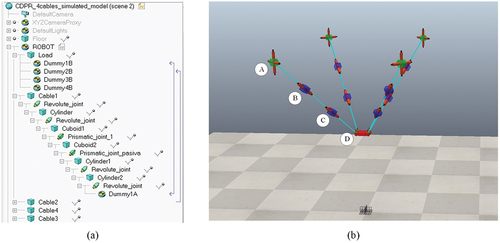
Figure 5. Mechanical and electronics elements of the CDPR prototype.
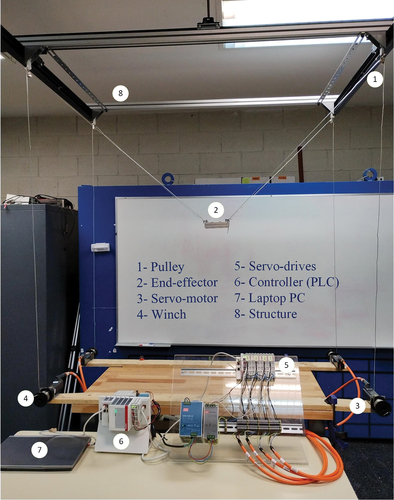
Figure 6. Three-dimensional pick & place trajectory for testing.
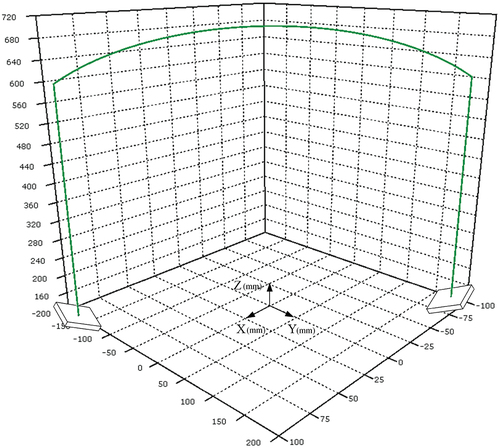
Table 2. Direct kinematic solution of an arbitrary point on the trajectory.
Table 3. Comparison of computing time of direct kinematic methods to obtain a new solution.
Figure 7. Reaction time difference between the position of the simulated and prototype axes with respect to the target position. a) simulated axis 1 and b) prototype axis 1 at slow speed. c) simulated axis 1 and d) prototype axis 1 at high speed.
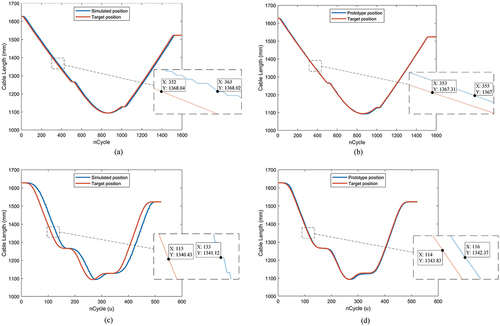
Figure 8. Trajectories of the prototype, simulator, and target at two different speeds. Subfigures (a–c) show trajectories at 100 mm/s, and (d–f) at 500 mm/s, across X-Z, Y-Z, and X-Y planes, respectively.
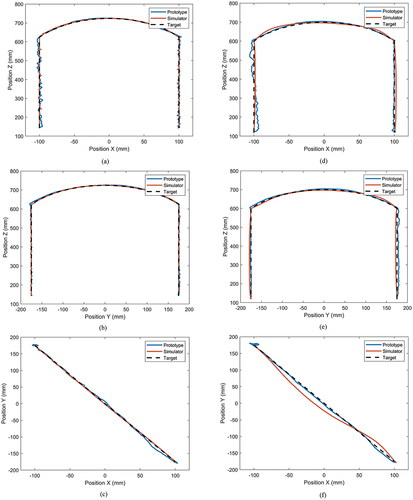
Table 4. Absolute error metrics during trajectory execution.
Table 5. Mean relative position error during trajectory execution.