
ABSTRACT
The aim of this scoping review was to gather, summarize, and map the knowledge of peoples’ experiences on humanoid robots, capable of assisting people with activities of daily living. The review was guided by the framework of Joanna Briggs Institute and PRISMA-ScR. We found 44 papers describing nine robots that could assist with a variety of tasks listed in the International Classification of Functioning, Disability, and Health. The mixed population experienced little or no anxiety toward the robots, and most accepted the robots’ ability to monitor for safety reasons. Some participants disliked the robots’ large size and slow movements. Most of the participants found the robots easy to use. They wanted improvements in the robots’ functionality and the ability to personalize services. Several of the participants found the services interesting and useful, but not for themselves. The experiences of humanoid robotic assistance showed an insufficient level of technical readiness for assisting in physical assistance, a lack of personalization and readiness for use in home settings. The practical relevance of these findings lies in guiding future research and development toward a more individualized approach focusing on user needs and experiences to enhance the efficacy and integration of humanoid robots in health-care.
Introduction
Having a physical disability greatly affects the independence for many people, as they may be in more or less constant need of assistance from both formal and informal caregivers. In 2030, there will be an estimated shortage of 5.7 million nurses worldwide. This shortage of resources is partly demographically driven by population growth and aging. Additionally, it is linked to the ambition goals of service delivery outlined in the context of the Sustainable Development Goals (Broadbent et al., Citation2016; World Health Organization, Citation2017, Citation2020). The future strain on health services might reduce the help for people with physical disabilities who need assistance with their daily activities (ADL).
Recent technological advances have aimed at the provision of services facilitating self-management and autonomy, which pertains to an individual’s capacity to exercise personal choices and maintain control over their lives. This progress particularly targets individuals with diverse disabilities, aiming to enhance their independence, while alleviating burden on healthcare systems (Gignac & Cott, Citation1998; Kritikos, Citation2018; World Health Organization, Citation2020). Such technologies may include memory aids, sensors for detecting falls, and safe delivery of medication. In addition robots (humanoid and non-humanoid) have emerged as a healthcare technology that offer independence and safety for users, as well as high quality and consistent services (Pripfl et al., Citation2016b; Reeves et al., Citation2020; University of Cincinatty UC Health, Citation2021).
For example, social robots such as Pepper and Nao (Robinson & Nejat, Citation2022) may provide companionship, reminders for cognitive disabled and supervision of simple exercises. Both Pepper and Nao are humanoid robots developed by Softbank Robotics. Pepper is larger, more advanced and designed for commercial applications, while Nao is smaller, simpler, and commonly used in research and educational settings (Softbank Robotics, Citation2023). Studies show that such robots are experienced as enjoyable, friendly, and safe (Bilyea et al., Citation2017; Melkas et al., Citation2020; Papadopoulos et al., Citation2020). They are however not capable of assisting users with physical tasks, such as bringing a glass of water or picking up something from the floor. Examples of available assistive robot products for people with disabilities are My Spoon (Song et al., Citation2013) that can assist with eating, and JACO (Beaudoin et al., Citation2019) that can assist users in gripping objects. Robots able to assist users with a variety of physical tasks such as Hobbit, Care-O-bot and PR2 (), have been tested in trials but are not yet fully developed to be used as home care assistants for people with disabilities. Such robots could contribute to independence for this potential user-group. This includes individual`s dependent on human carers, such as those who have suffered a stroke, spinal cord injury, cerebral palsy, or paralysis due to other neurological conditions. However, as for all welfare and health technology products, such robots will need to be accepted by users. Low acceptance of technologies has been associated with non-adoption or abandonment of the services (Heerink et al., Citation2010; Venkatesh et al., Citation2003). Investigating peoples’ experiences with such robots is therefore essential.
Previous reviews have investigated different users’ perceptions and opinions of assistive robots. Vandemeulebroucke, et al (Citation2018a, Citation2018b, Citation2021) investigated older, mainly healthy adults`, experiences, and opinions of a wide range of aspects of socially assistive robots. The participants had both negative and positive experiences of the robots assisting them in daily life. The authors suggested that investigating lived experiences can create an opportunity for technological innovations in healthcare. Savela et al. (Citation2017) found more positive experiences than negative in studies of attitudes toward robots in elderly care. Papadopoulos et al. (Citation2020) investigated enablers and barriers for implementation of socially assistive robots in health care. The enablers found were enjoyment, usability, personalization, and familiarization. Barriers were related to technical problems, to the robots’ limited capabilities and the negative preconceptions toward the use of robots in healthcare. All these reviews report a summary of results from a variety of studies, including a range of different robots, both assisting in terms of prompting and reminding, providing entertainment but only a few, assisting with physical assistance. However, there is a need to comprehend the current status of humanoid robots able to assist physically disabled people in ADL, and perceived experiences of humanoid robots assisting in ADL. This knowledge is crucial to assess the potential of robots for supporting the autonomy and independence of physically disabled individuals as well as alleviating the burden on healthcare systems.
Objective
This study aimed to give an overview of the robots capable of physically assisting in a variety of ADL activities, like fetching and picking up objects, to enhance the independent living of people with physical disabilities. Currently, none of the robots providing physical assistance appear to be available on the market. However, given the ongoing evolution of technology our goal was to explore whether these robots have undergone testing and to understand people’s experiences with them, either through direct interaction or video demonstrations. The research questions guiding this review were:
What kind of humanoid robots exists that can physically assist in ADL (such as bringing and picking up objects) and potentially support the independent living of people with physical disabilities?
What are users’ experiences of humanoid robots assisting with ADL in terms of; perspectives of the robots’ efficacy in aiding in ADL, the visual aesthetics of the robots, users’ perceptions of safety and privacy and the ease of operating the robots?
We aimed to gather, summarize, and map the range of knowledge to understand the status of the novel research field on robots for assistance in the home. We aim to fill a gap in the literature on this topic, as there is currently sparse knowledge in this area. The insights gained from this review are anticipated to offer novel contributions to the field, providing valuable guidance for stakeholders including robot developers and healthcare and welfare technology service providers.
Method
Study design
Preliminary searches conducted within various research databases indicated a limited research field pertaining to humanoid robots assisting with physical ADL activities. This exploratory phase yielded a diversity of study designs and studies with early stages of research. Consequently, we adopted a Scoping Review methodology as the aim was to provide a broad overview of the literature. A Scoping Review is appropriate when exploring a complex or emerging field (M. D. J. Peters et al., Citation2020).
We used the Joanna Briggs Institute (JBI) framework (M. D. J. Peters et al., Citation2020), and the Preferred Reporting Items for Systematic Reviews and Meta-Analyses Extension for Scoping Reviews (PRISMA-ScR) (Tricco et al., Citation2018) to guide the rationale for the review, eligibility criteria, information sources and selection of evidence and how to report the results. PRISMA-ScR was used to ensure transparent and complete reporting (Tricco et al., Citation2018).
Our study protocol was registered in Current Research Information System in Norway; Cristin project ID: 2526318.
Data sources and search
We searched CINAHL, MEDLINE, EMBASE, APA PsychInfo and Scopus. The different databases were searched for eligible studies from 2012 to 2022. The search strategy, including all identified keywords and index terms, was adapted for each database and/or information source (). Primary search terms were described by using the Population, Concept and Context elements (M. Peters et al., Citation2021) (). Each of the terms defining the context were paired with the terms defining the concept of robots, activities of daily living and experience. We did not specify terms for the population as pilot-searches showed that this restricted the search and results considerably. An experienced librarian supervised the search strategy based on the inclusion and exclusion criteria ().
Table 1. Primary search terms.
Table 2. Inclusion and exclusion criteria.
Inclusion and exclusion criteria
We included humanoid robots with human features, such as arms and fingers. These body-parts were seen as necessary to assist persons with physical tasks in a home setting (ADL activities). We did however apply a broad definition (Cambridge Dictionary) of humanoid robots when discussing discrepancies between authors: “a machine or creature with the appearance and qualities of a human.,” to ensure that we did not miss out on any important studies.
In addition we used the Classification of Functioning, Disability, and Health (ICF) and the domains of self-care, mobility and domestic life (World Health Organization, Citation2021), as a framework for ADL activities. The ICF is the World Health Organization’s framework for measuring health and disability at both the individual and population levels. This meant, we included robots able to assist in i.e. (but not limited to): eating, drinking, washing oneself, transferring and tidying or cleaning.
Due to the rapid development of this technology, we included research papers, conference papers/proceedings, book chapters and reports (Levac et al., Citation2010). The papers had to be written in English. The preliminary searches revealed that the relevant papers on the targeted robots were within the past decade. Consequently, we incorporated papers from the last 10 years.
Exclusion criteria were guided by our focus and research questions. We therefore excluded robots with no human features, and those used exclusively for monitoring, communication, companionship, and robots for surgical purposes. We excluded assistive devices for ADL. We also excluded studies in which participants were not exposed to any robot either directly or by video.
Data extraction
As suggested by Arksey and O’Malley (Citation2005) and Levac et al. (Citation2010), the team developed a standardized list for screening after discussion of the preliminary findings from the pilot searches. The search was performed in January 2022 and resulted in 8017 studies. First, 3197 duplicates were removed by automation tools or manually (The EndNote Team, Citation2013). Then, 4820 publications were transferred to Rayyan software for screening of the papers (Ouzzani et al., Citation2016).
Data highlighting the research questions were extracted from the retrieved papers and transferred to excel under the following elements: author(s), year of publication, country of origin, study aim, population, method, context, robot name, connection to a project and participants experiences of the robot.
Transparency
Two of the co-authors independently screened the papers by title and abstract and met regularly to discuss conflicts. Inter-rater discrepancies were resolved by discussion with the third author. Full-text studies were screened by two independent authors, with a second discussion on the discrepancies with the third author. The reference list was then screened for additional studies. In addition, we searched the web and contacted authors of the included papers and distributors of the robots for information about the status of the robots.
To ensure that the extraction process was rigorous and transparent, the standardized data abstraction tool was pilot tested among all reviewers. The data was extracted by the first author, discussed for consensus by the second and third author.
Results
presents the PRISMA flow diagram (PRISMA-ScR) (Tricco et al., Citation2018). The result was 44 full text papers. The reasons for exclusions are listed in the flow diagram.
Figure 1. Flow diagram for study selection.
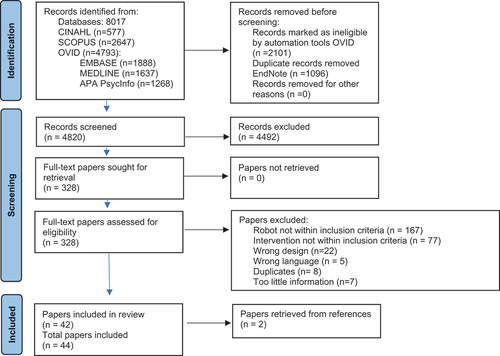
The papers, published between 2012–2022 originated from Austria, Belgium, Germany, Greece, Israel, Italy, Japan, the Netherlands, Poland, Sweden, the UK and the USA. They encompassed both journal and conference papers and were published in journals on health and technology. Many of the papers presented both the development of the technology, and users’ experiences of the robots. Among the papers, seven employed quantitative methods, 10 utilized qualitative methods, and 28 adopted mixed methods. Some questionnaires that were used were inspired by established models such as the technology acceptance model (Venkatesh & Bala, Citation2008), The unified theory of acceptance and use of technology (UTAUT) (Venkatesh et al., Citation2003) and the Almere model (Heerink et al., Citation2010). Standardized questionnaires applied included the Godspeed (Bangor et al., Citation2008; Bartneck et al., Citation2009; Piasek & Wieczorowska-Tobis, Citation2018), the system usability scale (SUS) (Bartneck et al., Citation2009; Bevilacqua et al., Citation2015; Cavallo et al., Citation2018; DiNuovo et al., Citation2018; Fischinger et al., Citation2016; Körtner et al., Citation2014), the user experience questionnaire (Schrepp et al., Citation2014) and the AttrakDif (Gerlowska et al., Citation2018; Hassenzahl et al., Citation2003).
The final sample of papers, shown in , include author(s), year of publication, aim of study, population, method, context, and users’ experience with robots.
Table 3. Included papers with aims, population, robot, method, and participants experiences on robot interaction, appearance, functionality, and usability.
There are 33 main authors for the 44 papers. Several of these papers refer to the same research project and robot ().
Table 4. Included papers connected to the same project.
In 33 papers, the participants interact with a robot. In ten studies, the participants are shown videos of a robot in action, and in one study the participants operate the robot remotely (Grice & Kemp, Citation2019). In 33 of the papers, it is evident that the investigation primarily focuses on, or include older adults. A few studies include younger participants (Arnold & Scheutz, Citation2018; Bakracheva et al., Citation2020; Brandl et al., Citation2016; Chen et al., Citation2013; Grice et al., Citation2013; Hendrich et al., Citation2015; Park et al., Citation2020; Rosenthal von der Pütten & Krämer, Citation2015). The interaction with robots has been performed in real homes (including age care facilities), simulated homes (living-labs) and other settings like universities and laboratories.
The included robots and how they have been used to assist physically in ADL
The robots studied in the papers () are all mobile robots, mounted on a wheeled base. They exhibit various forms of torsos, and heads. The Care-O-bot`s head is affixed to the torso, while the heads of the RAMCIP and HomeMates’ are animations on a tablet. HOBBIT, PR2, Doro, TIAGo and Artificial Robot (AR) have more human-like heads. The robots are equipped with either one or two arms featuring grippers, enabling them to assist in ADL activities. The robots have the ability to either navigate automatically or under the control of an operator or user. illustrates how these different humanoid robots have been employed to assist people with ADL, encompassing tasks such as, fetching and retrieving objects, garbage disposal, tidying up and assisting with laundry. For more comprehensive technological descriptions the papers and in some cases the projects, distributor’s websites can be consulted. outline the status of the robots,’ the author, distributor, or website.
Table 5. Robots and functions outlined in the papers.
Table 6. Robot status.
Users’ experiences of domestic humanoid robots assisting in ADL
Four categories of experiences related to use of the robots were identified through the included papers: (1) the robots’ ability to assist with ADL, (2) the robots` appearance, (3) users’ sense of safety and privacy, and (4) ease of use. Results are provided with a numerical representation when provided in the papers.
The robots’ ability to assist with ADL
Ar
Participants expressed positive reactions after watching videos of the robot AR doing laundry. They considered it useful and were interested in having it. They scored the robot high on likability and considered household chores as suitable for the robot (Rosenthal von der Pütten & Krämer, Citation2015).
Care-O-bot
All participants found it useful to teach the robot how to perform new behaviors such as prepare a meal, and most (n = 17/19) were comfortable with the robot notifying both them and others of a problem in the home (Saunders et al., Citation2016).
Participants had mixed responses to whether the robot should prompt healthy behavior. While they found the reminder function useful, some considered it potentially annoying (Bedaf et al., Citation2016). Users suggested that the robot should possess the ability to cook, open doors, fetch and carry objects and contact help in an emergency. However they did not want the robot to support in showering, toileting or getting dressed (Bedaf et al., Citation2018). In a study by Lee et al. (Citation2016) the participants were found to be overly favorable toward robots (n = 5/7). However, they did not see themselves as the target audience, and associated robot assistance more with disability than age.
Doro (Oro, Coro)
The Robot-Era project entails the collaboration of three robots, each with distinct functionalities. Of the three only Doro falls within our inclusion criteria.
Most users appreciated the robots’ services. The assistance in disposing garbage was particularly mentioned. Participants appreciated communicating with the robot and stated that the robot would ease the burden on family members who provided care (Bevilacqua et al., Citation2015, Citation2021; DiNuovo et al., Citation2014, Citation2018). They wanted to communicate more with the robot and wished for more complex functionalities in Doro (Bevilacqua et al., Citation2021). Assistance in grocery delivery was not desired by the participants in Cavallo et al. (Citation2014) study, as they found shopping an enjoyable task that improved their quality of life. The participants that did not have mobility issues did not see the need for the robot assisting with walking (Cavallo et al., Citation2018).
HOBBIT
Participants were positive or indifferent to the tasks they tried out with the robot (Lammer et al., Citation2014; Vincze et al., Citation2014). They expressed appreciation for various functions including carrying objects, emergency recognition, fitness programs, reminders (Pripfl, et al., Citation2016b), walking support, assistance rising from a chair or from a fall (Körtner et al., Citation2014), and notably picking up dropped objects (Fischinger et al., Citation2016; Körtner et al., Citation2014; Pripfl, Citation2016a; Pripfl, Körtner, Batko-Klein, Hebesberger, Weninger, Gisinger, Frennert, et al., Citation2016b). However, some users found the robot too slow (Fischinger et al., Citation2016; Körtner et al., Citation2014; Pripfl, et al., Citation2016b). While a subset of participants perceived the robot more as a toy (Bajones et al., Citation2020; Eftring & Frennert, Citation2016) and not contributing significantly to their independence (Pripfl, Citation2016a; Pripfl, Körtner, Batko-Klein, Hebesberger, Weninger, Gisinger, Frennert, et al., Citation2016b), they believed it could be helpful in the future (Bajones et al., Citation2020; Fischinger et al., Citation2016; Körtner et al., Citation2014). In Fischinger et al. (Citation2016) the participants (65%) stated that they could envision having the robot take care of them. However, 45% were skeptical, expressing the preference for a human helper.
HomeMate
The older adults in the study of HomeMate, communicated with the robot through the tablet and provided feedback on the tablets design. Participants found the robot friendlier and were willing to interact with it for longer periods of time, when the interface had a human avatar. Mejia (Citation2015) found that combining avatars and graphical user interfaces, can improve users’ perceptions of robot’s capabilities.
PR2
Beer et al. (Citation2017) found that participants (n = 9/12) were positive to the robot delivering medication. They expressed that it could save time and effort, particularly favoring the robot delivering medication bottles over single pills. The robot’s proficiency in finding objects, clean the house and assistance with transfers were deemed most useful. Participants appreciated the idea of teaching the robot new tasks and liked the way that the robot organized objects. While they preferred a human to assist with care, leisure, and personal assistance, they leaned toward a robot to do chores, information management and object manipulation (Beer et al., Citation2017; Smarr et al., Citation2014). A few participants preferred having the robot initiate actions and to speak (9/25 quotes), but most participants did not (16/25 quotes) (Deutsch et al., Citation2019). Users expressed a desire for the robot in providing feeding assistance and to handle tasks such as answering the door and assist with dressing, including putting on socks and fastening bras (Chen et al., Citation2013; Park et al., Citation2020).
RAMCIP
Participants in Gerlowska et al. (Citation2018) found that the robot would enhance their quality of life, improve everyday functioning, and lighten the burden on caregivers. However, the efficiency of the RAMCIP was rated as low, attributed to the current functionality and participants’ somewhat unrealistic expectations (Gerlowska et al., Citation2018).
ROBCO
Upon watching videos of ROBCO, all (n = 32) participants expressed the belief that the robot would enhance their independence. They preferred the robot`s assistance in carrying heavy objects, bring water and food, issue warnings about possible deterioration, aiding in shopping and supporting the visually impaired. While they found the rehabilitation function useful, the ability to assess upper limb function was not deemed as valuable (Bakracheva et al., Citation2020).
TIAGo
TIAGo received positive ratings for being useful and likeable in tasks like picking up objects, entertainment and guiding in physical exercises. Although there was, a small difference between users with and without prior experience with technologies, overall, users reported positive feelings during the 10-week interaction with TIAGo (Piasek & Wieczorowska-Tobis, Citation2018).
Experience of the robot’s appearance
Some of the participants stated that they found the Robot-Era robots too big and bulky (Cavallo et al., Citation2014; Hendrich et al., Citation2015). This was particularly expressed for the PR2 robot (Deutsch et al., Citation2019; Prakash et al., Citation2014). Participants disliked the laser scanner in the front of PR2. They did, however, agree that the robot’s functionalities were more important than its appearance.
There were mixed reports on Doro’s appearance (Cavallo et al., Citation2014; Hendrich et al., Citation2015)
Participants enjoyed the HOBBIT’s voice (88%) and face (69%) (Körtner et al., Citation2014) and missed the robot after the trial ended (Eftring & Frennert, Citation2016). Participants reacted to the HOBBIT as being too warm, and the sound from its fan being too loud, but it was also considered cute (Bajones et al., Citation2020). Participants stated that they wanted their robot to look human and have human characteristics. Otherwise it should look elegant, beautiful and non-intrusive (Prakash et al., Citation2014).
Feelings on safety and privacy
None of the participants in the papers reported feeling scared or unsafe around the robots. However, participants interacting with HOBBIT did not think that its presence made them feel safer, especially in scenarios like falling (Eftring & Frennert, Citation2016; Pripfl, Citation2016a; Pripfl, Körtner, Batko-Klein, Hebesberger, Weninger, Gisinger, Frennert, et al., Citation2016b), and users (62,5%) reported a higher degree of anxiety and insecurity over time with HOBBIT (Bajones et al., Citation2020). Some participants expressed concerns that the Care-O-bot might refuse to perform tasks, such as bringing a drink, potentially leading to dehydration. Piasek and Wieczorowska-Tobis (Citation2018) found that participants felt calm during their interactions with TIAGo. Those interacting with RAMCIP expressed that the robot would enhance their sense of safety (Gerlowska et al., Citation2018). Cavallo et al. (Citation2018), found that participants felt safer due to robot warnings. Moreover, participants believed they would feel at a lower risk of falling, since the robot could both bring them what they needed and function as walking support (Doro). Participants watching the AR robot evaluated it as safe (Rosenthal von der Pütten & Krämer, Citation2015). Participants reported feeling safe in close encounters with PR2, such as feeding and shaving (Grice et al., Citation2013; Park et al., Citation2020).
Concerning privacy, participants reported mixed experiences. Cavallo et al. (Citation2018) participants did not consider the robots intrusive. Bedaf et al. (Citation2016) found that the participants saw data sharing as necessary when receiving assistance from Care-O-bot. However, they did not want the robot to override their decisions and emphasized that users would have to agree to assistance. Others worried about their privacy when being monitored by the robot (Lee & Riek, Citation2018; Lee et al., Citation2016).
Perceived ease of use
The papers detail participants’ experiences using the robots with different interfaces. HOBBIT received positive feedback and was described as easy or rather easy to use (Bajones et al., Citation2018; Eftring & Frennert, Citation2016; Fischinger et al., Citation2016; Pripfl, et al., Citation2014). However, users had various experiences in controlling the robot. Some (49%) preferred voice commands, despite occasional misunderstandings (Körtner et al., Citation2014). Hearing-impaired participants preferred the touchscreen and separate buttons. Users disliked the HOBBIT communicating through gestures, as they often forgot what the gestures meant (Bajones et al., Citation2020; Körtner et al., Citation2014). Some expressed frustration with errors, technical difficulties, or the robot’s failure to understand voice commands. The participants perceived that usability increased after interacting with the PR2 (Beer et al., Citation2017; Smarr et al., Citation2014).
For ROBCO, voice control, and remote control through internet was rated as the most appropriate. Controlling the robot’s arm and grippers, received mixed response with, 55% considering it easy, and 44% difficult. The majority preferred to self-control but would also accept remote control by relatives or health professionals (Bakracheva et al., Citation2020). Regarding PR2, participants who controlled the robot, found some tasks easy to perform, and that harder tasks became easier with practice (Grice & Kemp, Citation2019; Kapusta et al., Citation2019; Park et al., Citation2020). Beer et al. (Citation2012) found that participants preferred voice command (83%), but others did not mind using a joystick (Likert scale 3,25/5) or a laser pointer to control the PR2 (Likert scale 3,25/5). There was disagreement on whether others should control the robot remotely.
Most participants enjoyed using Doro according to Bevilacqua et al (Citation2015, Citation2021). Users without technology experience faced difficulties using the control tablet (DiNuovo et al., Citation2014). The graphical user interface was praised despite occasionally technology failures (Bevilacqua et al., Citation2015). Preferences for interface combinations varied; some users preferred a mix of speech and graphic user interfaces, while others leaned toward the speech user interface (DiNuovo et al., Citation2014; Hendrich et al., Citation2015; Wang et al., Citation2016). Some of the users had difficulties with the dropdown menus on the tablet. Users needed support to control the robot and frustration arose during certain tasks (Bevilacqua et al., Citation2015). Initial trouble with the speech interface improved with training (DiNuovo et al., Citation2014, Citation2018).
Care-O-bots use of different light colors for communication, posed challenges in recalling their meaning (Bedaf et al., Citation2018; Koay et al., Citation2014). Younger participants found the interface on the robot easier to use than the older participants (Saunders et al., Citation2016). Users had mixed feelings on whether someone else should set up the robot. In Bedaf et al. (Citation2018), all the participants managed to complete the selected tasks and felt a sense of collaboration with the robot.
Participants in Mejia (Citation2015) struggled to remember and learn icons on the graphical user interface (tablet) on HomeMate.
Discussion
The robots identified in this review have several software capabilities, like virtual communication and entertainment, but can only provide a limited number of physical assistance services within the ICF-framework domains of self-care, mobility, and domestic life. Within the mobility-related activities, we found robots that could bring the users an object, a drink or a medication, and pick up something that had fallen to the floor. Some robots could assist in transfer and support users when walking. In the domain of domestic life, some robots could do household chores. One robot could load and turn on a washing machine, another could assist in shopping and put garbage into a bin. One robot could fold towels. Another could assist users with self-care like covering them with a blanket, feeding them, wiping the mouth and shaving. These activities have all been highlighted within ICF-domains that best describe the spectrum of prototypical problems in functioning and health in people after suffering from stroke, spinal cord injury, cerebral palsy, and the elderly (Bedaf et al., Citation2014; ICF-Research-Branch, Citation2017). It is therefore likely that users with physical disabilities could benefit from the assistance of robots. Hence, developers of assistive robots could apply the ICF framework to align the robots’ capabilities with users’ limitations.
Older adults favored robots that could perform tasks like retrieving and removing items and disposing of garbage. Some expressed that the robot could increase their independence and improve their quality of life. This is in line with research (Venkatesh et al., Citation2003), which shows that performance expectancy or perceived usefulness is one of the most important factors in user acceptance of technology. However, as in Wu et al. (Citation2016) study, several participants mentioned that the robots assisted them when it was unnecessary. This is because in many of the included papers, older adults were recruited on the basis of their age, not because they had needs that the robots could fulfill. This required the older adults to imagine that they would experience decline and answer questions about perceived future needs. Some participants may have found this difficult.
Wu et al. (Citation2016) also described that the reluctance to use robot technology could be a form of passive resistance, explained by a fear of adopting or accepting the use of assistive technology would lead to stigmatization. Although fear or anxiety itself is not a direct determent of intention to use new technology in the UTAUT (Venkatesh et al., Citation2003) or the Almere model (Heerink et al., Citation2010), both age and experience were found to moderate users’ performance expectancy, or ease of use, and thereby intention to use. This implies that with practice and familiarity with a technology, users may find the systems easier to use and start using it more. This was confirmed by Beer et al. (Citation2017).
We found no examples of papers that presented cases where users had purchased or otherwise fully implemented a robot in their home, and only a few studies were performed in users’ homes. This could be attributed to the insufficient technical readiness of these robots. As healthcare technologies must adhere to ISO standards for certification (International Organization for Standardization Citation2022), assistive robots face the critical requirement of operating reliably in diverse conditions. Ensuring robustness in navigation, object recognition, and overall system stability is essential for establishing user trust and acceptance. Technical challenges such as sensor errors or system failures can pose obstacles to the successful deployment of these robots (Papadopoulos et al., Citation2020) but also jeopardize user safety, potentially giving rise to adverse events.
Many daily tasks in a home environment involve a level of complexity that current assistive robots may struggle to handle. Tasks such as navigating through cluttered spaces, object manipulation, and responding to unstructured environments pose significant technical challenges.
This may imply that assistive robots need to be highly adaptable to diverse home environments and user needs. Achieving this adaptability in a cost-effective manner is a technical hurdle, requiring advanced sensors, machine learning algorithms, and sophisticated robotic hardware.
Participants frequently commented that the robots should be able to perform more complex tasks to support their independence. Users’ expectations of the performance and usefulness of a technological system were closely linked to the intention of use, as proposed by Venkatesh et al. (Citation2003).
The participants mentioned the importance of personalizing the robots. The literature has addressed this finding (Andtfolk et al., Citation2021; Papadopoulos et al., Citation2020; Pino et al., Citation2015). Personalization has shown to affect users’ acceptance of robots, which will determine their willingness to use the robots (Pino et al., Citation2015). The robot must not perform activities that the users enjoy doing and that keep them active. The robot must, however, assist with activities that users cannot perform, or that deprive them of energy they would rather spend on other activities. The personalization of a robot’s features will of course be both expensive and time consuming and require access to technical maintenance since users’ requirements are bound to change with their health status.
Based on our results we advocate for a multidisciplinary approach to developing future robots for physical assistance, employing co-creation methods, that involve all stakeholders including developers, potential users and caregivers. The ICF framework can serve as a foundation for a practical guideline that could identify specific domains relevant in the context of assistive robotics. Such a guideline could assist in translating the concepts from the ICF framework into practical requirements for assistive robots. For example, if mobility is a key domain, consider how the robot can assist with mobility challenges, such as helping users move from one location to another. A guideline could further suggest how to assess how the robot can adapt to different environmental contexts and individual user characteristics to enhance its effectiveness and usability. And also, how to consider the diverse preferences and requirements of users with varying abilities and disabilities and ensure that the development and deployment of robots align with ethical standards outlined in the ICF framework.
Four papers discuss the topic of whether services could be delivered by a robot or by a human (Beer et al., Citation2017; Fischinger et al., Citation2016; Smarr et al., Citation2012, Citation2014). Some participants did not want robots to assist them with anything; others stated that they would use a robot for some practical tasks or to do chores but would prefer a human for personal care tasks. These findings could be related to the lack of trust in the robot’s ability to assist with personal care. Trust in the robot is essential to accept its delivery of services. The robots’ characteristics and performance have been found to be the most influential factors in the development of trust (Hancock et al., Citation2011). Grice and Kemp (Citation2019) and Kapusta et al. (Citation2019) show that a robot can safely provide care assistance, and that users accept and appreciate this assistance. Hence, robot developers should recognize that future users will experience robots differently, and that certain assistance tasks that are accepted by some users might be rejected by others.
The integration of humanoid assistive robots in healthcare brings up ethical and societal concerns. For example, these robots may gather and process sensitive patient data, emphasizing the need for robust security measures to safeguard patient privacy (Boada et al., Citation2021). In addition to meeting ISO standards, clear guidelines for obtaining patient consent regarding data collection and storage are essential to address privacy issues (Battistuzzi et al., Citation2018; International Organization for Standardization, Citation2022).
Furthermore, defining the extent of humanoid robots’ involvement in decision-making processes without infringing on patient autonomy is crucial. As found in Bedaf et al. (Citation2016) the robot must not override the users’ decisions, and the user must agree to have a robotic helper (Bedaf et al., Citation2016). Ethical design, emphasizing empathy and cultural sensitivity, is also vital for positive human-robot interactions (Battistuzzi et al., Citation2018, Boada et al., Citation2021). Accessibility for all individuals, regardless of socioeconomic status or geographical location, is essential to avoid healthcare disparities driven by technology. As concerns about being able to afford the robot was mentioned by participants in the review, reasonable implementation costs are crucial to prevent a divide between institutions that can and cannot afford humanoid technology. To optimize the benefits of humanoid robots and prevent misuse, healthcare professionals and patients require proper training. In addition, strategies for retraining and providing alternative employment opportunities need consideration in situations where robots may replace human caregivers. Designing humanoid robots sensitive to diverse cultural norms is crucial for acceptance across different communities (Battistuzzi et al., Citation2018).
The results of this review indicate that these robots need further development before they will be ready for implementation. Hence, our review may provide valuable information for developers about users´ experiences of humanoid robots assisting in ADL, and developments needed in provision of physical assistive robotic functions within the ICF categories of self-care, mobility and domestic life.
Considering each user’s needs and supporting them with information to set realistic expectations will be a future concern for developers and decision makers in health service provision.
Limitations
While we demonstrated transparency by utilizing the Joanna Briggs framework, we recognize that our research team could have benefitted from incorporating technical expertise. Despite conducting a thorough search across health-related and technical databases and journals, it is improbable that we identified all studies within our scope. We anticipate that certain studies, particularly those detailing technical features and possibly incorporating user tests not explicitly mentioned in titles or abstracts, might have been unintentionally excluded. We did not perform internet or forward citation searches in this review. Limitations of our study include the exclusive review of English papers, potentially overlooking relevant publications in other languages. Recognizing that pertinent studies might have been conducted in regions such as Asia, a more diverse representation of nationalities in our research team could have enhanced the comprehensiveness of our analysis.
Many of the studies describe the same projects. A limitation of this study might then be that some results are overlapping, this however relates mainly to qualitative statements. was developed for transparency regarding overlapping papers and projects.
Conclusion
In this Scoping Review of humanoid robots assisting in daily activities, we analyzed 44 papers focusing on nine robots able to assist users with physical disabilities. These robots can perform tasks such as finding objects and doing household chores, with one capable of assisting in care tasks. Despite the robots’ diverse capabilities, the readiness for physical assistance falls short for widespread implementation. While most participants expressed positivity toward the robots and their helpful services, concerns included dissatisfaction with size and speed, and some faced challenges with interfaces and voice control. The size of the humanoid robots could be seen as intimidating or overwhelming for certain individuals, especially when space is limited, making their presence cumbersome. Dissatisfaction may arise if users have high expectations for the speed of services, as any perceived delay can lead to dissatisfaction. Challenges with the interface, such as difficulty understanding commands or misinterpretations, can contribute to frustration and dissatisfaction, ultimately leading to nonadopting of the technology.
Participants desired robots with enhanced functionalities and personalization options. Although many found the services interesting and useful, some did not perceive them as necessary. This study highlights the intricate landscape of assistive robots, revealing both their capabilities and limitations. These insights bear substantial implications for the future of healthcare and the development of assistive technology. The study underscores the imperative for refining physical assistance capabilities, aligning development of robots with the ICF framework, and addressing user expectations, trust factors, technical challenges, societal attitudes, ethical considerations and context. We suggest that future research utilize the ICF framework and adopt a user-centric and multidisciplinary approach to ensuring that assistive robots effectively meet the diverse and evolving needs of users, contributing to an enhanced quality of life for individuals with physical disabilities.
Programming robots to navigate ethical dilemmas in alignment with human values is a complex challenge requiring careful consideration. Assessing the potential impact of humanoid robots on relationships and interpersonal dynamics is vital for understanding broader societal implications (Boada et al., Citation2021). To harness the benefits of humanoid assistive robots responsibly, it is crucial to address these ethical and societal considerations in healthcare integration. Continuous dialogue among healthcare professionals, technologists, ethicists, and the general public is essential to navigate these complex issues.
Acknowledgements
The authors would like to thank Ellen Sejersted for highly appreciated contribution to this work.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Andtfolk, M., Nyholm, L., Eide, H., & Fagerstrom, L. (2021). Humanoid robots in the care of older persons: A scoping review. Assistive Technology: The Official Journal of RESNA, 34(5), 518–526. https://doi.org/10.1080/10400435.2021.1880493
- Arksey, H., & O’Malley, L. (2005). Scoping studies: Towards a methodological framework. International Journal of Social Research Methodology, 8(1), 19–32. https://doi.org/10.1080/1364557032000119616
- Arnold, T., & Scheutz, M. (2018). Observing robot touch in context: How does touch and attitude affect perceptions of a Robot’s social qualities? [Paper presentation]. HRI ’18: Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction February 2018. 352–360. https://doi.org/10.1145/3171221.3171263
- Bajones, M., Fischinger, D., Weiss, A., de la Puente, P., Wolf, D., Vincze, M., Kortner, T., Weninger, M., Papoutsakis, K., Michel, D., Qammaz, A., Panteleris, P., Foukarakis, M., Adami, I., Ioannidi, D., Leonidis, A., Antona, M., Argyros, A., … Frennert, S. (2020). Results of field trials with a mobile service robot for older adults in 16 private households [robotics 4140]. ACM Transactions on Human-Robot Interaction, 9(2), 1–27. (Journal of Human-Robot Interaction). https://doi.org/10.1145/3368554
- Bajones, M., Fischinger, D., Weiss, A., Wolf, D., Vincze, M., De La Puente, P., Körtner, T., Weninger, M., Papoutsakis, K., Michel, D., Qammaz, A., Panteleris, P., Foukarakis, M., Adami, I., Ioannidi, D., Leonidis, A., Antona, M., Argyros, A., Mayer, P., … Frennert, S. (2018). Hobbit: Providing fall detection and prevention for the elderly in the real world [Article]. Journal of Robotics, 2018, 1–20. https://doi.org/10.1155/2018/1754657
- Bakracheva, M., Chivarov, N., & Ivanov, A. (2020). Companion robotic assistants for improving the quality of life of people with disabilities. 2020 International Conference Automatics and Informatics (ICAI), Varna, Bulgaria, 1–6. https://doi.org/10.1109/ICAI50593.2020.9311320
- Bangor, A., Kortum, P. T., & Miller, J. T. (2008). An empirical evaluation of the system usability scale. International Journal of Human–Computer Interaction, 24(6), 574–594. https://doi.org/10.1080/10447310802205776
- Bartneck, C., Kulić, D., Croft, E., & Zoghbi, S. (2009). Measurement instruments for the anthropomorphism, animacy, likeability, perceived intelligence, and perceived safety of robots. International Journal of Social Robotics, 1(1), 71–81. https://doi.org/10.1007/s12369-008-0001-3
- Battistuzzi, L., Sgorbissa, A., Papadopoulos, C., Papadopoulos, I., & Koulouglioti, C. (2018). Embedding ethics in the design of culturally competent socially assistive robots. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1996–2001. https://doi.org/10.1109/IROS.2018.8594361
- Beaudoin, M., Lettre, J., Routhier, F., Archambault, P. S., Lemay, M., & Gélinas, I. (2019). Long-term use of the JACO robotic arm: A case series. Disability and Rehabilitation: Assistive Technology, 14(3), 267–275. https://doi.org/10.1080/17483107.2018.1428692
- Bedaf, S., de Witte, L., Marti, P., & Amirabdollahian, F. (2018). A multi-perspective evaluation of a service robot for seniors: The voice of different stakeholders. Disability and Rehabilitation Assistive Technology, 13(6), 592–599. https://doi.org/10.1080/17483107.2017.1358300
- Bedaf, S., Draper, H., Gelderblom, G.-J., Sorell, T., & de Witte, L. (2016). Can a service robot which supports independent living of older people disobey a command? The views of older people, informal carers and professional caregivers on the acceptability of robots [robotics 4140]. International Journal of Social Robotics, 8(3), 409–420. https://doi.org/10.1007/s12369-016-0336-0
- Bedaf, S., Gelderblom, G. J. A., Syrdal, D. S. V., Lehmann, H., Michel, H., Hewson, D., Amirabdollahian, F., Dautenhahn, K., & de Witte, L. (2014). Which activities threaten independent living of elderly when becoming problematic: Inspiration for meaningful service robot functionality. Disability and Rehabilitation Assistive Technology, 9(6), 445–452. https://doi.org/10.3109/17483107.2013.840861
- Beer, J. M., Fisk, A. D., & Rogers, W. A. (2015). Commanding home robots: A comparison between older adults with and without mobility loss. Proceedings of the Human Factors and Ergonomics Society, 59(1), 70–74. https://doi.org/10.1177/1541931215591015
- Beer, J. M., Prakash, A., Smarr, C.-A., Chen, T. L., Hawkins, K., Nguyen, H., Deyle, T., Mitzner, T. L., Kemp, C. C., & Rogers, W. A. (2017). Older users’ acceptance of an assistive robot: Attitudinal changes following brief exposure [health psychology & medicine 3360]. Gerontechnology, 16(1), 21–36. https://doi.org/10.4017/gt.2017.16.1.003.00
- Beer, J. M., Prakash, A., Smarr, C.-A., Mitzner, T. L., Kemp, C. C., & Rogers, W. A. (2012). “Commanding your robot” older adults’ preferences for methods of robot control. Proceedings of the Human Factors and Ergonomics Society Annual Meeting Human Factors and Ergonomics Society Annual Meeting, 56(1), 1263–1267. https://doi.org/10.1177/1071181312561224
- Bevilacqua, R., Felici, E., Amabili, G., Maranesi, E., & Cavallo, F. (2021). Designing acceptable robots for assisting older adults: A pilot study on the willingness to interact. International Journal of Environmental Research and Public Health, 18(20), 10686. https://doi.org/10.3390/ijerph182010686
- Bevilacqua, R., Felici, E., Marcellini, F., Glende, S., Klemcke, S., Conrad, I., Esposito, R., Cavallo, F., & Dario, P. (2015). Robot-era project: Preliminary results on the system usability. Lecture Notes in Computer Science, 9188, 553–561. https://doi.org/10.1007/978-3-319-20889-3_51
- Bilyea, A., Seth, N., Nesathurai, S., & Abdullah, H. A. (2017). Robotic assistants in personal care: A scoping review. Medical Engineering and Physics, 49, 1–6. https://doi.org/10.1016/j.medengphy.2017.06.038
- Boada, J. P., Maestre, B. R., & Genís, C. T. (2021). The ethical issues of social assistive robotics: A critical literature review. Technology in Society, 67, 101726. https://doi.org/10.1016/j.techsoc.2021.101726
- Brandl, C., Mertens, A., & Schlick, C. M. (2016). Human-robot interaction in assisted personal services: Factors influencing distances that humans will accept between themselves and an approaching service robot [robotics 4140]. Human Factors and Ergonomics in Manufacturing & Service Industries, 26(6), 713–727. https://doi.org/10.1002/hfm.20675
- Broadbent, E., Kerse, N., Peri, K., Robinson, H., Jayawardena, C., Kuo, T., Datta, C., Stafford, R., Butler, H., Jawalkar, P., Amor, M., Robins, B., & MacDonald, B. (2016). Benefits and problems of health-care robots in aged care settings: A comparison trial. Australasian Journal on Ageing, 35(1), 23–29. https://doi.org/10.1111/ajag.12190
- Cavallo, F., Esposito, R., Limosani, R., Manzi, A., Dario, P., Bevilacqua, R., Felici, E., Lattanzio, F., DiNuovo, A., & Cangelosi, A. (2018). Robotic services acceptance in smart environments with older adults: User satisfaction and acceptability study. Journal of Medical Internet Research, 20(9), e264. https://doi.org/10.2196/jmir.9460
- Cavallo, F., Limosani, R., Manzi, A., Bonaccorsi, M., Esposito, R., DiRocco, M., Pecora, F., Teti, G., Saffiotti, A., & Dario, P. (2014). Development of a socially believable multi-robot solution from town to home [robotics 4140]. Cognitive Computation, 6(4), 954–967. https://doi.org/10.1007/s12559-014-9290-z
- Chen, T. L., Ciocarlie, M., Cousins, S., Grice, P. M., Hawkins, K., Kaijen, H., Kemp, C. C., Chih-Hung, K., Lazewatsky, D. A., Leeper, A. E., Hai, N., Paepcke, A., Pantofaru, C., Smart, W. D., & Takayama, L. (2013). Robots for humanity: Using assistive robotics to empower people with disabilities. IEEE Robotics & Automation Magazine, 20(1), 30–39. https://doi.org/10.1109/mra.2012.2229950
- Deutsch, I., Erel, H., Paz, M., Hoffman, G., & Zuckerman, O. (2019). Home robotic devices for older adults: Opportunities and concerns. Computers in Human Behavior, 98, 122–133. https://doi.org/10.1016/j.chb.2019.04.002
- DiNuovo, A., Broz, F., Belpaeme, T., Cangelosi, A., Cavallo, F., Esposito, R., & Dario, P. (2014). A web based multi-modal interface for elderly users of the robot-era multi-robot services. IEEE International Conference on Systems, Man and Cybernetics (SMC), San Diego, CA, USA, 2186–2191. https://doi.org/10.1109/SMC.2014.6974248
- DiNuovo, A., Broz, F., Wang, N., Belpaeme, T., Cangelosi, A., Jones, R., Esposito, R., Cavallo, F., & Dario, P. (2018). The multi-modal interface of robot-era multi-robot services tailored for the elderly [robotics 4140]. Intelligent Service Robotics, 11(1), 109–126. https://doi.org/10.1007/s11370-017-0237-6
- Eftring, H., & Frennert, S. (2016). Designing a social and assistive robot for seniors [gerontology 2860]. Zeitschrift für Gerontologie und Geriatrie, 49(4), 274–281. (Zeitschrift fur Gerontologie). https://doi.org/10.1007/s00391-016-1064-7
- The EndNote Team. (2013). EndNote. In (Version EndNote X9) [64 bit]. Clarivate Analytics.
- Fischinger, D., Einramhof, P., Papoutsakis, K., Wohlkinger, W., Mayer, P., Panek, P., Hofmann, S., Koertner, T., Weiss, A., Argyros, A., & Vincze, M. (2016). Hobbit, a care robot supporting independent living at home: First prototype and lessons learned. Robotics and Autonomous Systems, 75, 60–78. https://doi.org/10.1016/j.robot.2014.09.029
- Foukarakis, M., Antona, M., & Stephanidis, C. (2017). Applying a multimodal user interface development framework on a domestic service robot. Proceedings of the 10th International Conference on PErvasive Technologies Related to Assistive Environments, Island of Rhodes, Greece. https://doi.org/10.1145/3056540.3076187
- Gerlowska, J., Skrobas, U., Grabowska-Aleksandrowicz, K., Korchut, A., Szklener, S., Szczesniak-Stanczyk, D., Tzovaras, D., & Rejdak, K. (2018). Assessment of perceived attractiveness, usability, and societal impact of a multimodal robotic assistant for aging patients with memory impairments. Frontiers in Neurology, 9, 392. https://doi.org/10.3389/fneur.2018.00392
- Gignac, M. A. M., & Cott, C. (1998, September). A conceptual model of independence and dependence for adults with chronic physical illness and disability. Social Science & Medicine, 47(6), 739–753. https://doi.org/10.1016/S0277-9536(98)00149-X
- Grice, P. M., & Kemp, C. C. (2019). In-home and remote use of robotic body surrogates by people with profound motor deficits. Public Library of Science One, 14(3), e0212904. https://doi.org/10.1371/journal.pone.0212904
- Grice, P. M., Killpack, M. D., Jain, A., Vaish, S., Hawke, J., & Kemp, C. C. (2013). Whole-arm tactile sensing for beneficial and acceptable contact during robotic assistance. IEEE International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 1–8. https://doi.org/10.1109/ICORR.2013.6650464
- Hancock, P. A., Billings, D. R., Schaefer, K. E., Chen, J. Y. C., de Visser, E. J., & Parasuraman, R. (2011). A meta-analysis of factors affecting trust in human-robot interaction. Human Factors: The Journal of the Human Factors & Ergonomics Society, 53(5), 517–527. https://doi.org/10.1177/0018720811417254
- Hassenzahl, M., Burmester, M., & Koller, F. (2003). AttrakDiff: Ein Fragebogen zur Messung wahrgenommener hedonischer und pragmatischer Qualität. In G. Szwillus & J. Ziegler (Eds.), Mensch & Computer 2003: Interaktion in Bewegung (pp. 187–196). Vieweg+Teubner Verlag. https://doi.org/10.1007/978-3-322-80058-9_19
- Heerink, M., Krose, B., Evers, V., & Wielinga, B. (2010). Assessing acceptance of assistive social agent technology by older adults: The Almere model. International Journal of Social Robotics, 2(4), 361–375. https://doi.org/10.1007/s12369-010-0068-5
- Hendrich, N., Bistry, H., & Zhang, J. (2015). Architecture and software design for a service robot in an elderly-care scenario. Engineering, 1(1), 027–035. https://doi.org/10.15302/J-ENG-2015007
- ICF Research Branch. (2017). ICF research branch. Retrieved June 14, from. https://www.icf-research-branch.org/
- International Organization for Standardization. (2022). (ISO – 11.180). aids for disabled or handicapped persons.
- Kapusta, A. S., Grice, P. M., Clever, H. M., Chitalia, Y., Park, D., & Kemp, C. C. (2019). A system for bedside assistance that integrates a robotic bed and a mobile manipulator. Public Library of Science One, 14(10), e0221854. https://doi.org/10.1371/journal.pone.0221854
- Koay, K. L., Syrdal, D. S., Ashgari-Oskoei, M., Walters, M. L., & Dautenhahn, K. (2014). Social roles and baseline proxemic preferences for a domestic service robot. International Journal of Social Robotics, 6(4), 469–488. https://doi.org/10.1007/s12369-014-0232-4
- Körtner, T., Schmid, A., Batko-Klein, D., & Gisinger, C. (2014). Meeting requirements of older users? Robot prototype trials in a home-like environment. Lecture Notes in Computer Science, 8515, 660–671. https://doi.org/10.1007/978-3-319-07446-7_63
- Kritikos, M. (2018). Assistive technologies for people with disabilities. https://www.europarl.europa.eu/RegData/etudes/IDAN/2018/603218/EPRS_IDA(2018)603218_EN.pdf
- Lammer, L., Huber, A., Weiss, A., & Vincze, M. (2014). Mutual care: How older adults react when they should help their care robot. AISB 2014 – 50th Annual Convention of the AISB.
- Lee, H. R., & Riek, L. D. (2018). Reframing assistive robots to promote successful aging [robotics 4140]. ACM Transactions of Human-Robot Interaction, 7(1), 1–23. (Journal of Human-Robot Interaction). https://doi.org/10.1145/3203303
- Lee, H. R., Tan, H., & Sabanovic, S. (2016). That robot is not for me: Addressing stereotypes of aging in assistive robot design. 25th IEEE International Symposium on Robot and Human Interactive Communication, RO-MAN 2016, New York, NY, USA, 312–317. https://doi.org/10.1109/ROMAN.2016.7745148
- Levac, D., Colquhoun, H., & O’Brien, K. K. (2010). Scoping studies: Advancing the methodology. Implementation Science, 5(1), 69. https://doi.org/10.1186/1748-5908-5-69
- Mejia, A. (2015). Robotic interfaces design avatar and GUI competing for older user’s attention. Lecture Notes in Computer Science, 9193. https://doi.org/10.1007/978-3-319-20913-5_28
- Melkas, H., Hennala, L., Pekkarinen, S., & Kyrki, V. (2020). Impacts of robot implementation on care personnel and clients in elderly-care institutions [article]. International Journal of Medical Informatics, 134, Article 104041. https://doi.org/10.1016/j.ijmedinf.2019.104041
- Ouzzani, M., Hammady, H., Fedorowicz, Z., & Elmagarmid, A. (2016). Rayyan—a web and mobile app for systematic reviews. Systematic Reviews, 5(1), 210. https://doi.org/10.1186/s13643-016-0384-4
- Papadopoulos, I., Lazzarino, R., Ali, S., & Koulouglioti, C. (2020). Enablers and barriers to the implementation of socially assistive humanoid robots in health and social care: A systematic review. British Medical Journal Open, 10(1), 033096. https://doi.org/10.1136/bmjopen-2019-033096
- Park, D., Hoshi, Y., Mahajan, H. P., Kim, H. K., Erickson, Z., Rogers, W. A., & Kemp, C. C. (2020). Active robot-assisted feeding with a general-purpose mobile manipulator: Design, evaluation, and lessons learned [article]. Robotics and Autonomous Systems, 124, Article 103344. https://doi.org/10.1016/j.robot.2019.103344
- Peters, M., Godfrey, C., McInerney, P., Munn, Z., Tricco, A., & Khalil, H. (2021). Chapter 11: Scoping reviews (2020 version). Joanna Briggs Institute. Retrieved 22.12.22 from https://synthesismanual.jbi.global.1046658/JBIMES-20-12
- Peters, M. D. J., Marnie, C., Tricco, A. C., Pollock, D., Munn, Z., Alexander, L., McInerney, P., Godfrey, C. M., & Khalil, H. (2020). Updated methodological guidance for the conduct of scoping reviews. JBI Evidence Synthesis, 18(10), 2119–2126. https://doi.org/10.11124/JBIES-20-00167
- Piasek, J., & Wieczorowska-Tobis, K. (2018). Acceptance and long-term use of a social robot by elderly users in a domestic environment. Proceedings – 2018 11th International Conference on Human System Interaction, HSI 2018, Gdansk, Poland. https://doi.org/10.1109/HSI.2018.8431348
- Pino, M., Boulay, M., Rigaud, A.-S., & Jouen, F. (2015). “Are we ready for robots that care for us?” attitudes and opinions of older adults toward socially assistive robots. Frontiers in aging neuroscience, 7(JLc), 141. https://doi.org/10.3389/fnagi.2015.00141
- Prakash, A., Beer, J. M., Deyle, T., Smarr, C. A., Chen, T. L., Mitzner, T. L., Kemp, C. C., & Rogers, W. A. (2013). Older adults’ medication management in the home: How can robots help? ACM/IEEE International Conference on Human-Robot Interaction, Tokyo, Japan. https://doi.org/10.1109/HRI.2013.6483600
- Prakash, A., Kemp, C. C., & Rogers, W. A. (2014). Older adults’ reactions to a robot’s appearance in the context of home use. ACM/IEEE International Conference on Human-Robot Interaction, Bielefeld, Germany, 268–269. https://doi.org/10.1145/2559636.2559790
- Pripfl, J., Körtner, T., Batko-Klein, D., Hebesberger, D., Weninger, M., & Gisinger, C. (2016a). Social service robots to support independent living: Experiences from a field trial [article]. Zeitschrift für Gerontologie und Geriatrie, 49(4), 282–287. https://doi.org/10.1007/s00391-016-1067-4
- Pripfl, J., Körtner, T., Batko-Klein, D., Hebesberger, D., Weninger, M., Gisinger, C., Frennert, S., Eftring, H., Antona, M., Adami, I., Weiss, A., Bajones, M., & Vincze, M. (2016b). Results of a real world trial with a mobile social service robot for older adults. ACM/IEEE International Conference on Human-Robot Interaction, 2016, Christchurch, New Zealand, 497–498. https://doi.org/10.1109/HRI.2016.7451824
- Reeves, B., Hancock, J., & Liu, X. (2020). Social robots are like real people: First impressions, attributes, and stereotyping of social robots. Technology, Mind, and Behavior, 1(1). https://doi.org/10.1037/tmb0000018
- Robinson, F., & Nejat, G. (2022). An analysis of design recommendations for socially assistive robot helpers for effective human-robot interactions in senior care. Journal of Rehabilitation and Assistive Technologies Engineering, 9, 20556683221101389. https://doi.org/10.1177/20556683221101389
- Rosenthal von der Pütten, A. M., & Krämer, N. C. (2015). Individuals’ evaluations of and attitudes towards potentially uncanny robots. International Journal of Social Robotics, 7(5), 799–824. https://doi.org/10.1007/s12369-015-0321-z
- Saunders, J., Syrdal, D. S., Koay, K. L., Burke, N., & Dautenhahn, K. (2016). ‘Teach me-show me’-end-user personalization of a smart home and companion robot [article]. IEEE Transactions on Human-Machine Systems, 46(1), 27–40. Article 7322264. https://doi.org/10.1109/THMS.2015.2445105
- Savela, N., Turja, T., & Oksanen, A. (2017). Social acceptance of Robots in different occupational fields: A systematic literature review. International Journal of Social Robotics, 10(4), 493–502. https://doi.org/10.1007/s12369-017-0452-5
- Schrepp, M., Hinderks, A., & Thomaschewski, J. (2014). Applying the User Experience Questionnaire (UEQ) in different evaluation scenarios. Design, user experience, and usability. Theories, methods, and tools for designing the user experience. Springer. https://doi.org/10.1007/978-3-319-07668-3_37
- Smarr, C.-A., Mitzner, T. L., Beer, J. M., Prakash, A., Chen, T. L., Kemp, C. C., & Rogers, W. A. (2014). Domestic robots for older adults: Attitudes, preferences, and potential [gerontology 2860]. International Journal of Social Robotics, 6(2), 229–247. https://doi.org/10.1007/s12369-013-0220-0
- Smarr, C. A., Prakash, A., Beer, J. M., Mitzner, T. L., Kemp, C. C., & Rogers, W. A. (2012). Older adults’ preferences for and acceptance of robot assistance for everyday living tasks. Proceedings of the Human Factors and Ergonomics Society, 56(1), 153–157. https://doi.org/10.1177/1071181312561009
- Softbank Robotics. (2023, November 12). https://us.softbankrobotics.com/nao;https://us.softbankrobotics.com/pepper
- Song, W. K., Song, W. J., Kim, Y., & Kim, J. (2013). Usability test of KNRC self-feeding robot. IEEE International Conference on Rehabilitation Robotics, Seattle,WA,USA. https://doi.org/10.1109/ICORR.2013.6650501
- Tricco, A. C., Lillie, E., Zarin, W., O’Brien, K. K., Colquhoun, H., Levac, D., Moher, D., Peters, M. D. J., Horsley, T., Weeks, L., Hempel, S., Akl, E. A., Chang, C., McGowan, J., Stewart, L., Hartling, L., Aldcroft, A., Wilson, M. G., Tunçalp, Ö.… Straus, S. E. (2018). PRISMA extension for scoping reviews (PRISMA-ScR): Checklist and explanation. Annals of Internal Medicine, 169(7), 467–473. https://doi.org/10.7326/m18-0850
- University of Cincinatty UC Health. (2021). Benefits of robotic surgery. University of Cincinatty UC Health. Retrieved March 18 2023, from. https://www.uchealth.com/services/robotic-surgery/patient-information/benefits/
- Vandemeulebroucke, T., de Casterlé, B. D., & Gastmans, C. (2018a). How do older adults experience and perceive socially assistive robots in aged care: A systematic review of qualitative evidence [review]. Aging and Mental Health, 22(2), 149–167. https://doi.org/10.1080/13607863.2017.1286455
- Vandemeulebroucke, T., de Casterlé, B. D., & Gastmans, C. (2018b). The use of care robots in aged care: A systematic review of argument-based ethics literature. Archives of Gerontology and Geriatrics, 74, 15–25. https://doi.org/10.1016/j.archger.2017.08.014
- Vandemeulebroucke, T., Dzi, K., & Gastmans, C. (2021). Older adults’ experiences with and perceptions of the use of socially assistive robots in aged care: A systematic review of quantitative evidence. Archives of Gerontology and Geriatrics, 95, 104399. https://doi.org/10.1016/j.archger.2021.104399
- Venkatesh, V., & Bala, H. (2008). Technology acceptance model. Decision Sciences, 39(Number 2), 273–315. https://doi.org/10.1111/j.1540-5915.2008.00192
- Venkatesh, V., Morris, M. G., Davis, G. B., & Davis, F. D. (2003). User acceptance of information technology: Toward a unified view. MIS Quarterly, 27(3), 425–478. https://doi.org/10.2307/30036540
- Vincze, M., Zagler, W., Lammer, L., Weiss, A., Huber, A., Fischinger, D., Körtner, T., Schmid, A., & Gisinger, C. (2014). Towards a robot for supporting older people to stay longer independent at home [Paper presentation]. Proceedings for the Joint Conference of ISR 2014 – 45th International Symposium on Robotics and Robotik 2014 – 8th German Conference on Robotics, ISR/ROBOTIK 2014, Munich. Tokyo, Japan.
- Wang, N., Broz, F., DiNuovo, A., Belpaeme, T., & Cangelosi, A. (2016). A user-centric design of service robots speech interface for the elderly. Recent Advances in Nonlinear Speech Processing, 275–283. https://doi.org/10.1007/978-3-319-28109-4_28
- World Health Organization. (2017). Health employment and economic growth: An evidence base. IGO. https://www.who.int/hrh/resources/WHO-HLC-Report_web.pdf
- World Health Organization. (2020). State of the World’s nursing 2020. World-Health-Organization.
- World Health Organization. (2021). ICF browser. Retrieved December 22, 2022, from https://apps.who.int/classifications/icfbrowser/
- Wu, Y. H., Cristancho-Lacroix, V., Fassert, C., Faucounau, V., De Rotrou, J., & Rigaud, A. S. (2016). The attitudes and perceptions of older adults with mild cognitive impairment toward an assistive robot [article]. Journal of Applied Gerontology, 35(1), 3–17. https://doi.org/10.1177/0733464813515092