

ABSTRACT
This paper investigates the coordination control of large-scale systems (LSSs) with unknown external disturbances. The disturbances exist in the channels from the controllers to the actuators. To compensate the impact of disturbances, an extended observer using the output states is constructed, and an observer-based event-triggered controller is designed to save communication resources. Moreover, based on the event-triggering strategy, a controller using dynamic information estimation is designed, and Zeno behavior is further excluded. Finally, a DC micro-grid model is used for simulations to verify the effectiveness of the proposed control scheme.
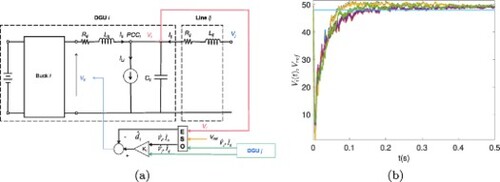
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
This work was supported by the Fundamental Research Funds for the Central Universities (Grant No. 2023YQ002) and the National Natural Science Foundation of China (Grant No. 62373150)