
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
Based on the stochastic uncertainty of the system's operating environment, this research presents statistical inferences on the mean time to failure (MTTF) of a K-out-of-N: G non-repairable system model with switching failure under Poisson shocks. The standby component is switched to the operating component when an operating component fails, with a switching failure probability of p. The MTTF of the system is derived by using the Markov process theory and the Laplace transform for two cases where the shock threshold is a constant value or a random variable. The maximum likelihood estimator (MLE) of the MTTF is obtained, and based on this estimator, asymptotic confidence interval estimation and hypothesis testing are performed. Based on the setting of the basic parameter values, the MTTF under two different cases of the shock threshold is compared. The effect of each parameter on the MTTF is analyzed in numerical simulation. The effectiveness of the above statistical inference methods is also verified by numerical simulation.
1. Introduction
The redundancy technology of standby components can improve system reliability. In reliability research and engineering, the k-out-of-n: G system with standby components is a general redundant system, where n denotes the number of components in the system, and the system can operate normally when the number of operating components in the system is not less than k. Generally speaking, the kinds of standby can be divided into cold standby, warm standby and hot standby. The k-out-of-n: G system with mixed cold and warm standby components is considered in this paper. Based on the different standby types of standby components, some scholars have used diverse methods to model and analyze the reliability of k-out-of-n: G non-repairable systems. By using the Markov model, Pham and Pham (Citation1991) deduced a closed-form solution of the instantaneous probability for a k-out-of-n: G non-repairable system with two failure modes. For a k-out-of-n: G non-repairable warm standby system with completely reliable switching, She and Pecht (Citation1992) developed a general closed-form equation of the system reliability. Amari and Dill (Citation2009) proposed an approach of k logical locations, which can effectively analyze the reliability of non-repairable systems with cold or warm standby and general failure time distributions. Boddu and Xing (Citation2012) proposed a system model composed of s-independent k-out-of-n: G mixed standby subsystems connected in series. Baek and Jeon (Citation2013) considered the optimization problem for a k-out-of-n: G system with mixed redundancy.
For redundant standby systems, the standby component may fail during the switchover process. For example, a standby generator in a plant power supply system may fail during switching from the standby to the operating one due to some complex physical reasons. Lewis (Citation1996) introduced standby switching failure into the study of system reliability for the first time. Ke et al. (Citation2008) focused on reliability and sensitivity for a repairable system with switching failure. Wang and Chen (Citation2009) studied a repairable system with general repair time, reboot delay and switching failure. Hsu et al. (Citation2014) investigated the maintenance of a warm standby machine and considered the switching failure of standby components and maintenance stress coefficient. Ke et al. (Citation2016) analyzed the performance metrics and optimization of a machine maintenance system with standby switching failure. Shekhar et al. (Citation2020) performed the reliability analysis for warm standby nodes provisioning computing network system with switching failure, vacation interruption and common cause failure. Yang and Wu (Citation2021) performed some reliability research for a standby repairable system with working breakdown and switching failure. In Liu et al. (Citation2022), a cost-benefit analysis of standby retrial systems with unreliable servers and switching failure was carried out. Given that the study for k-out-of-n: G non-repairable systems with mixed standby components rarely involves standby switching failure, and this failure situation does exist in engineering, the possibility of switching failure is considered in this paper.
In practical engineering, system components fail not only due to their lifetime, but also due to the impact of external random environment which is usually regarded as a shock. With the increasing requirements for evaluating the operation of system equipment in a stochastic environment, shock models are becoming more widely studied in the field of reliability. Barlow and Proschan (Citation1975) elaborated on the problem of the lifetime distribution of single-component systems under Poisson shocks. Shanthikumar and Sumita (Citation1983, Citation1984) proposed a class of shock model which is usually used to study seismic and inventory problems, and considered two cases where the system fails when the cumulative shock magnitude or a single shock magnitude exceeds the threshold, respectively. Wu and Wu (Citation2011) studied a two-unit cold standby repairable system under Poisson shocks. The external shocks only affect the operating unit and the failure of the unit is only caused by external shocks. In addition to the failure of the unit caused by external shocks, Wu (Citation2012) also considered the failure of the unit caused by the unit's lifetime, and then obtained optimal replacement strategies for a two-unit cold standby system. Wu et al. (Citation2015) conducted the reliability analysis of a multi-unit cold standby system in which both the operating unit and the transfer switch are affected by external shocks. El-Sherbeny and Elshoubary (Citation2020) investigated the reliability of a parallel system which consists of two different components and a repairer, in which the failure of the system is caused by external shocks. Ge et al. (Citation2021) considered a cold standby repairable system model under a stepped Poisson shock whose strength varies with the number of failures of operating components. El-Sherbeny and Hussien (Citation2022) studied the reliability of a parallel system under Poisson shocks where the repairer has an optional vacation. Based on the failure mechanism of components in a stochastic environment, in this paper, the failure of the operating component is caused by its lifetime or Poisson shocks.
In the evaluation of system reliability, the parameters in some distribution functions involved and various system reliability indices are generally not directly available. Therefore, many scholars have used statistical methods to infer the system reliability such as Kızılaslan (Citation2018), Wang et al. (Citation2020) and Rasekhi et al. (Citation2020). Statistical inference is always used to estimate the parameters/characteristics of a system by using experimental data or simulated data. Patawa et al. (Citation2022) analyzed the reliability of cold standby systems whose repair time follows the Lindley distribution, and estimated unknown parameters by using two methods of maximum likelihood and Bayesian. Kang et al. (Citation2023) studied the availability of a repairable retrial system with warm standby and priority, and estimated the system parameters using the Bayesian method. In previous studies on the statistical inference of the reliability of standby systems, most scholars considered the standby systems whose switching is completely reliable. For the statistical inference for the system availability/reliability with switching failure mechanism, Hsu et al. (Citation2011) derived the expression for the steady-state availability of three-component systems with unreliable repairer and switching failure, and carried out maximum likelihood estimation and hypothesis testing. However, Hsu et al. (Citation2011) did not consider using the Bayesian method to infer the reliability of this system. After that, Ke et al. (Citation2018) carried out Bayesian inference on the system model studied in the literature (Hsu et al., Citation2011) based on two different types of repair time distributions respectively. For the problem of statistical inference for k-out-of-n systems, based on Weibull and Burr-III distributions, Ali et al. (Citation2018) performed reliability inference for a s-out-of-k: G system stress-strength model using two methods, namely, maximum likelihood and Bayesian. Jana and Bera (Citation2022) carried out a study for constructing various estimation intervals of the stress-strength reliability of k-out-of-n: G systems. Chien et al. (Citation2006) estimated the asymptotic confidence interval of the steady-state availability and the MTTF of a k-out-of-m + s: G repairable system with an imperfectly reliable server. However, no literature has investigated the problem of statistical inference on the reliability of k-out-of-n systems with switching failure and mixed standby components.
The influence of the external environment on the operating components and the switching failure of standby components in actual engineering are considered in this paper. Hence, Poisson shock and switching failure are introduced into k-out-of-n: G non-repairable systems, and then a new reliability model of the k-out-of-n: G system with mixed standby components is constructed. In practical engineering, system reliability index is always a function containing component parameters. The analysis of system reliability is essentially an inference of the system reliability index by using statistical methods. No statistical inference has been made about the reliability characteristics of k-out-of-n: G systems with switching failure, which motivates us to explore the problem of statistical inference for the reliability of k-out-of-n: G systems with switching failure. Therefore, this work intends to investigate the statistical inference of the reliability of a k-out-of-n: G system with switching failure under Poisson shocks. The used methods are classical statistics and Monte Carlo simulation. This work can provide a scientific theory and a method for reliability assessment and quality management of k-out-of-n: G systems.
The rest of this paper is structured as follows. The considered system model is described in detail and some assumptions are given in Section 2. Furthermore, the model is analyzed and the recursive expression of the MTTF is obtained. Section 3 is devoted to the statistical inference of the MTTF. Numerical simulation studies are presented to verify the performance of the statistical inference method in Section 4. In addition, the influence of system parameters on the MTTF is analyzed, and the MTTF under two different threshold conditions is compared. The conclusions and some suggestions for future research are given in Section 5.
2. System modeling and analysis
2.1. Model description
The considered system operates in an environment with Poisson shocks. The system is composed of N components, including M identical operating components, W identical warm standby components, and C identical cold standby components. The failed components cannot be repaired. Once the number of operating components in the system is less than K, the system fails. The system is noted as a K-out-of-N: G non-repairable system. After the system fails, the components in the system will not continue to fail. The specific assumptions of this system model are given as follows.
All components fail independently.
At time t = 0, M components are operating and all components are new.
The operating component in the system is affected by the lifetime of the component itself or external shocks. The lifetime X of each operating component and the standby lifetime Y of each warm standby component are assumed to be exponentially distributed with parameters
and
Each shock affects the components independently of each other, only the operating components are affected by the shock, and the shock does not affect the standby components. The magnitude
If an operating component fails, a standby component is switched to an operating component instantly, and the warm standby component is switched preferentially. The switching time is negligible.
In the process of component switching, the standby components may fail with a failure probability of
All the random variables in this model are independent of each other.
Case 1: The threshold is a constant value υ.
From assumptions (3) and (4), the failure probability of a single component due to a shock is
(1)
(1) The event
represents that a shock causes the specified s−r components among the M−r operating components in the system to fail, and the remaining M−s operating components are normal. We note that r and s (
) represent the numbers of failed operating components before and after shock, respectively. The
represents the probability of occurrence of
, and then
(2)
(2) Assuming that the distribution of the shock magnitude
is an exponential one with the parameter u, then Equation (Equation2
(2)
(2) ) can be expressed as
(3)
(3)
Case 2: The threshold is a random variable V, which follows a distribution with the cumulative distribution function φ.
From assumptions (3) and (4), the failure probability of a single component is when the value of the shock magnitude is
. Let
, and then
(4)
(4) Let
be the distribution function of H, and then we have
(5)
(5) Assuming that the distribution function F is the same as the distribution function φ, then the distribution of H is a uniform distribution on the interval (0, 1). Then, Equation (Equation5
(5)
(5) ) can be expressed as
(6)
(6)
2.2. System state analysis
At time t, let represent the number of failed components in the system. According to the model description, the state of the system at time t is denoted by
, which constitutes a continuous-time homogeneous Markov process with the state space
, where
and
are the set of working states and the set of failure states, respectively.
The state probability of the system at time t is defined as follows.
Therefore, the vector of the state probability of the system is
Let
,
,
,
and
represent the transition rates of the number of failed components in the system from i to j under different conditions, respectively. The transition rates between the states of the system are given as follows.
When the number of failed components in the system is i, one component fails due to shock or its lifetime. Then the transition rate is given by
When the number of failed components in the system is i and there are standby components, that is
When
When j = W + C + 1,
When
When the number of failed components in the system is i and there are no standby components, that is
2.3. State transition rate matrix of the system
The state transition rate matrix of the system can be divided into block matrices according to the existence situation of standby components, the situation of standby switching, and the system working state, so
is represented as follows:
where
is a square matrix of order N + 1.
The subblocks in the matrix are as follows:
where
2.4. The analysis of system reliability index
The MTTF of the system can be interpreted as the mean time required for the system from the initial startup to the failure states (i.e., absorbing states). If the matrix is used directly to calculate the MTTF, it will be very complicated. Therefore, we can consider only the working states of the system and obtain a matrix
that removes the rows and columns of
corresponding to the absorbing states as follows:
The vector of the working state probability of the system at time t is
, where
According to the forward Kolmogorov's equations and the initial condition of state probability, we have
(7)
(7) Using the partitioned state transition rate matrix
and the vector
of the working state probability, we have
(8)
(8)
(9)
(9)
(10)
(10) The differential Equations (Equation8
(8)
(8) )–(Equation10
(10)
(10) ) are expanded, then the Laplace transform is performed. Thus, one can get the algebraic equations are as follows:
(11)
(11)
(12)
(12)
(13)
(13)
(14)
(14)
(15)
(15) where
.
By solving the algebraic Equations (Equation11(11)
(11) )–(Equation15
(15)
(15) ) recursively, one can obtain
(16)
(16)
(17)
(17) where
Based on the above calculation results and system reliability function
, the Laplace transform of R(t) is obtained by
(18)
(18) The MTTF of the system can be obtained from the relationship between the MTTF and reliability function, and is expressed as
(19)
(19)
3. Statistical inference of the MTTF
3.1. Maximum likelihood estimation
Let ,
and
be random samples with sample size n from the operating component's lifetime X, the standby lifetime Y of the warm standby component and the arrival interval U of the shocks, respectively. Given each sample, the likelihood functions concerning each parameter respectively are as follows:
(20)
(20)
(21)
(21)
(22)
(22) Thus, given samples
,
and
, the likelihood function of parameters
, β and
is
(23)
(23) and then, its log-likelihood function is
(24)
(24) Let
,
and
be the MLEs of parameters
,
and
, respectively. Then
is obtained by
. Similarly,
and
can be obtained. Thereinto,
,
and
are the sample means of
,
and
, respectively.
Based on the invariance of MLE, the ,
and
are brought into Equation (Equation19
(19)
(19) ) to obtain the MLE of the MTTF, which is noted as
.
3.2. Asymptotic confidence interval estimation
The distribution of is difficult to derive exactly. However, the asymptotic likelihood theory can be used to obtain the asymptotic distribution of
. So, the asymptotic confidence interval of the MTTF for the system can be constructed. The Fisher information matrix of
is given by
(25)
(25) where
The inverse matrix of the Fisher information matrix is
(26)
(26) and thus
follows a 3-dimensional asymptotic normal distribution with mean value vector
and covariance matrix
, i.e.,
.
According to the multivariate Delta method, follows an asymptotic normal distribution with mean value MTTF (see Equation (Equation19
(19)
(19) )) and variance
, i.e.,
(27)
(27) where
, and then
(28)
(28) From
, the asymptotic confidence interval of a confidence level of 100(1-α)
for the MTTF is obtained as
(29)
(29) where
is the
th quantile of the standard normal distribution and
can be computed at
.
3.3. Hypothesis testing
Aside from the estimations mentioned above, hypothesis testing about the MTTF is also a statistical inference issue. The significance test, which first makes a hypothesis about the characteristics of the population, and then a sampling study is conducted to determine whether the hypothesis should be rejected. In Section 3.2, can be known. Based on hypothesis testing of mean value, the null hypothesis and alternative hypothesis for the MTTF, using an upper-tail test in one-tail tests, are as follows:
(30)
(30) where
is the MTTF at a constant level. Testing is implemented with the asymptotic distribution and the Z-test, and then the rejection region of the test at the significance level α is
(31)
(31) The power function of this test represents the probability of the sample observations falling within the rejection region and is expressed by:
(32)
(32) where
is a standard normal random variable.
Hypothesis testing can make two types of errors: false positive and false negative. In significance testing, the focus is generally on controlling the probability of Type I error. That is also known as false positive, where sample observations fall within the rejection region when the null hypothesis is true. Type I error rate is denoted as . Let
, and then
, where
.
4. Numerical simulation
Based on the system reliability model and evaluation method proposed in this paper, the 2-out-of-7: G system consisting of 3 operating components, 2 warm standby components and 2 cold standby components is taken as an example for numerical simulation and analysis. Assuming that in Case 1, u = 0.5 and . Let
,
,
and p = 0.005 be the basic parameter values. First, the estimated results of the MTTF are obtained under different parameters
and
. Further, the parameter values are fixed, asymptotic confidence interval simulations are performed, and the simulation results are evaluated. To evaluate the performance of the asymptotic confidence interval of the MTTF, the coverage rate (
), mean length (ML) and standard deviation (SD) of the confidence interval are considered. Finally, the power function and Type I error rate in hypothesis testing are simulated.
4.1. Basic steps of estimation
In this section, the basic steps for performing maximum likelihood estimation and asymptotic confidence interval estimation for the MTTF are given as follows.
Step 1: Given specific parameter values, then determine the specific distributions of X, Y and U.
Step 2: Generate random samples with sample size n based on Step 1, denoted as
Step 3: Calculate
Step 4: Substitute
Step 5: Substitute
Step 6: Calculate the asymptotic confidence interval according to Equation (Equation29
4.2. Results of the maximum likelihood estimation
Let n = 20, 40, 60, 80, 100. Then ,
and
are random samples with sample size n from the exponential distributions of the corresponding parameters, respectively. For Cases 1 and 2, the mean values of 1000 simulated estimation results for the MTTF with different parameters
and
are given in Tables and , respectively.
Table 1. Case 1: MTTF with different parameters and
.
Table 2. Case 2: MTTF with different parameters and
.
Tables and show that the MTTF decreases with increasing and
. Also, it is observed that the component's failure rate
has a greater effect on the MTTF than the intensity of the shocks
. The reason is that although the arrival of a shock flow can affect more than one operating component, the arrival of the shock does not necessarily cause the failure of the component. Based on the given distributions and parameters of the shock magnitude and threshold, the probability of the component failure caused by the shock is small. By comparing the numerical results in Tables and , it can be found that the MTTF in Case 2 is larger than that in Case 1, under the same parameters. The reason is that the probability of the component failure caused by the shock in Case 2 is smaller than that in Case 1. In Tables and , the estimated results under different sample sizes n are compared with the true values, respectively. It is discovered that simulation results fluctuate around the true values and these results become closer to the true values as n increases.
4.3. Simulation and evaluation of asymptotic confidence interval
Based on the basic parameter values, the asymptotic confidence interval of the MTTF is simulated when . Taking the significance level
, the 95
confidence interval of the MTTF is indicated by the following formula:
For a fixed sample size n, the number of simulations is 1000. Let
be the indicator function that the true value of the MTTF falls within the confidence interval of the qth simulation, which follows a two-point distribution with a parameter of 0.95. Then the number of simulated confidence intervals covering the true value follows the binomial distribution B(1000, 0.95). According to the central limit theorem (CLT), one can get
where
. Thus, the probability of the coverage rate
falling into the following interval is 99
.
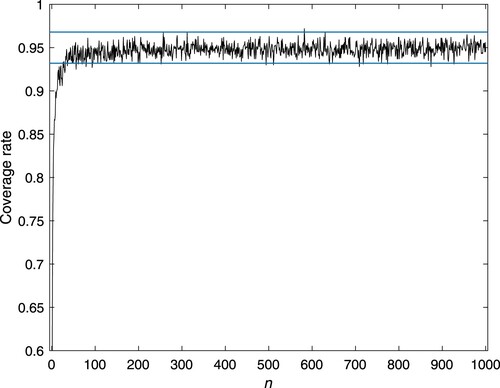
For different n, Figures and display the coverage rate of the 95
confidence interval of the MTTF. It is observed that the coverage rate of the 95
confidence interval of the MTTF basically fluctuates within the theoretical interval of (0.932, 0.968) when the sample size n is large enough.
Figure 1. Case 1: Coverage rate of the 95% confidence interval of the MTTF.
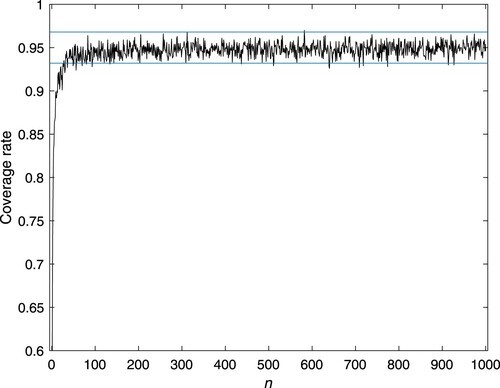
Figure 2. Case 2: Coverage rate of the 95 confidence interval of the MTTF.
For different thresholds, the simulated ML and SD of the 95% confidence interval for the MTTF are given in Tables and . In Tables and , it is observed that the SD gradually decreases and approaches 0 as n increases. For the proposed confidence level, the interval estimation with the smallest mean length of the interval is the best. As n increases, the ML of the interval becomes progressively shorter, and the confidence interval performs better. Combining the coverage rate, ML and SD of the confidence interval, it is discovered that the simulation of the asymptotic confidence interval of the MTTF is optimistic, and the larger the sample size n, the better the result.
Table 3. Case 1: ML and SD.
Table 4. Case 2: ML and SD.
4.4. Power function and Type I error rate for hypothesis testing
For a given n, after constructing the asymptotic confidence interval of the MTTF, the power function is calculated by taking the significance level , considering
. In Section 4.3, and the simulations are run 1000 times, and the results are recorded as
,
, …,
. Let
be the indicator function that the cth simulated estimation result of the MTTF falls within the rejection region, and the simulated value of the power function is
.
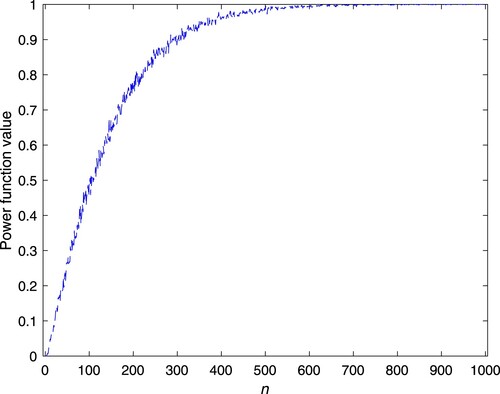
Figures and show the simulated power function values of the test for different sample sizes n. As can be seen, increases as n increases for any given
and converges to a maximum value of 1. The probability of
falling within the rejection region approaches 1, which is clearly in line with the actual situation. Comparing Figures and , it is observed that the speed of the power function value tending to 1 in Case 2 is faster than that in Case 1. In Section 4.2, the MTTF of Case 2 is larger than that of Case 1 under the same parameters. Therefore the distance between MTTF and
is positively correlated with the speed of the power function value tending to 1.
Figure 3. Case 1: Power function value of the test.
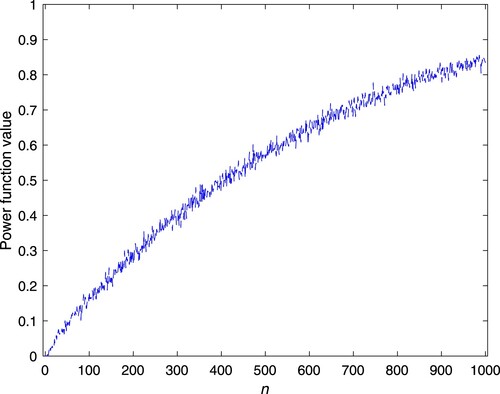
Figure 4. Case 2: Power function value of the test.
By considering the case of , Type I error rate is simulated to evaluate the performance of the rejection rule. In Cases 1 and 2, let
and
, respectively. Type I error rate is the probability of
falling within the rejection region when
. So the simulated Type I error rate is
.
follows the binomial distribution B(1000, 0.05),
which is obtained by the CLT. Thus, the probability of
falling into the following interval is 99%.
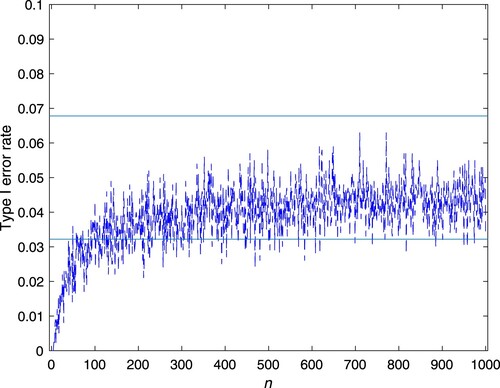
Figures and show the simulated Type I error rate of the test for Cases 1 and 2, respectively. It is observed that the Type I error rate basically fluctuates within the theoretical interval of (0.0322, 0.0678) when the sample size n is large enough.
Figure 5. Case 1: Type I error rate of the test.
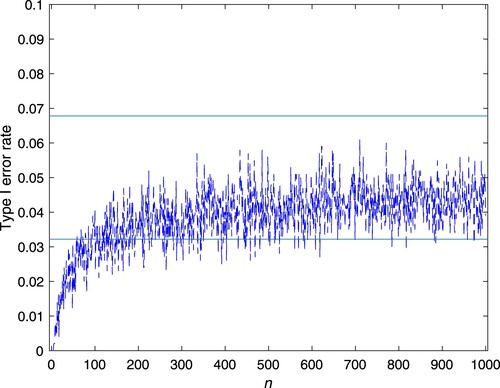
Figure 6. Case 2: Type I error rate of the test.
5. Conclusion
This work investigates a statistical inference problem about the MTTF of a K-out-of-N: G system in a shock environment, which is modeled by considering switching failure, mixed standby and Poisson shocks. Based on the Markov process theory, the state transition rate matrix of the system and state probability equations are constructed to deduce the analytical expression of the MTTF. The MLE and the asymptotic confidence interval of the MTTF are obtained by using sample data generated from random simulations. As the sample size increases, the simulation results demonstrate that the MLE of the MTTF is closer to the true value, the ML and SD of the asymptotic confidence interval gradually decrease, and the performance of the power function for the hypothesis testing becomes better. Based on the basic values of system parameters, the MTTF for two different cases of the shock threshold are compared. It is observed that the MTTF under Case 2 is larger than that under Case 1. The effect of each parameter on the MTTF is analyzed, which indicates that the component's failure rate has a greater effect on the MTTF than the intensity of the shocks
. In the system model of this paper, the lifetime of all components follows an exponential distribution. While it would be more general to study a situation where the lifetime of components follows a general distribution. Therefore, Poisson shocks and switching failure can be introduced into complex systems with general distribution in the future, which has important theoretical significance and reference value for the analysis and evaluation of system reliability index.
CRediT author statement
Fang Luo: Methodology, Software, Writing – original draft preparation, Visualization. Linmin Hu: Conceptualization, Writing – review and editing, Funding acquisition. Yuyu Wang: Writing – review and editing. Xiaoyun Yu: Validation.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Ali, A., Khaliq, S., Ali, Z., & Dey, S. (2018). Reliability estimation of s-out-of-k system for non-identical stress-strength components. Life Cycle Reliability and Safety Engineering, 7(1), 33–41. https://doi.org/10.1007/s41872-018-0039-7
- Amari, S. V., & Dill, G. (2009). A new method for reliability analysis of standby systems. In 2009 Annual Reliability and Maintainability Symposium (pp. 417–422).
- Baek, S., & Jeon, G. (2013). A k-out-of-n system reliability optimization problem with mixed redundancy. Journal of the Korean Institute of Industrial Engineers, 39(2), 90–98. https://doi.org/10.7232/JKIIE.2013.39.2.090
- Barlow, R. E., & Proschan, F. (1975). Statistical theory of reliability and life testing: Probability models. Holt, Rinehart and Winston.
- Boddu, P., & Xing, L. (2012). Redundancy allocation for k-out-of-n: G systems with mixed spare types. In 2012 Proceedings Annual Reliability and Maintainability Symposium (pp. 1–6).
- Chien, Y. H., Ke, J. C., & Lee, S. L. (2006). Asymptotic confidence limits for performance measures of a repairable system with imperfect service station. Communication in Statistics-Simulation and Computation, 35(3), 813–830. https://doi.org/10.1080/03610910600716563
- El-Sherbeny, M. S., & Elshoubary, E. (2020). Stochastic analysis of reliability indices for a redundant system under Poisson shocks. International Journal of Computer Applications, 176(19), 21–30. https://doi.org/10.5120/ijca2020920143
- El-Sherbeny, M. S., & Hussien, Z. M. (2022). Reliability analysis of a two nonidentical unit parallel system with optional vacations under Poisson shocks. Mathematical Problems in Engineering, 2022, 2488182. https://doi.org/10.1155/2022/2488182
- Ge, X., Sun, J., & Wu, Q. (2021). Reliability analysis for a cold standby system under stepwise Poisson shocks. Journal of Control and Decision, 8(1), 27–40. https://doi.org/10.1080/23307706.2019.1633961
- Hsu, Y. L., Ke, J. C., & Liu, T. H. (2011). Standby system with general repair, reboot delay, switching failure and unreliable repair facility—A statistical standpoint. Mathematics and Computers in Simulation, 81(11), 2400–2413. https://doi.org/10.1016/j.matcom.2011.03.003
- Hsu, Y. L., Ke, J. C., Liu, T. H., & Wu, C. H. (2014). Modeling of multi-server repair problem with switching failure and reboot delay and related profit analysis. Computers and Industrial Engineering, 69, 21–28. https://doi.org/10.1016/j.cie.2013.12.003
- Jana, N., & Bera, S. (2022). Interval estimation of multicomponent stress-strength reliability based on inverse Weibull distribution. Mathematics and Computers in Simulation, 191, 95–119. https://doi.org/10.1016/j.matcom.2021.07.026
- Kang, J., Hu, L., Peng, R., Li, Y., & Tian, R. (2023). Availability and cost-benefit evaluation for a repairable retrial system with warm standbys and priority. Statistical Theory and Related Fields, 7(2), 164–175. https://doi.org/10.1080/24754269.2022.2152591
- Ke, J. B., Lee, W. C., & Ke, J. C. (2008). Reliability-based measure for a system with standbys subjected to switching failures. Engineering Computations, 25(7), 694–706. https://doi.org/10.1108/02644400810899979
- Ke, J. C., Chang, C. J., & Lee, W. C. (2018). An availability-based system with general repair via Bayesian aspect. Mathematics and Computers in Simulation, 144, 247–265. https://doi.org/10.1016/j.matcom.2017.09.001
- Ke, J. C., Liu, T. H., & Yang, D. Y. (2016). Machine repairing systems with standby switching failure. Computers and Industrial Engineering, 99, 223–228. https://doi.org/10.1016/j.cie.2016.07.016
- Kızılaslan, F. (2018). Classical and Bayesian estimation of reliability in a multicomponent stress–strength model based on a general class of inverse exponentiated distributions. Statistical Papers, 59(3), 1161–1192. https://doi.org/10.1007/s00362-016-0810-7
- Lewis, E. (1996). Introduction to reliability engineering (2nd ed.) John Wiley & Sons.
- Liu, T. H., Huang, Y. L., Lin, Y. B., & Chang, F. M. (2022). Cost-benefit analysis of a standby retrial system with an unreliable server and switching failure. Computation, 10(4), 48–64. https://doi.org/10.3390/computation10040048
- Patawa, R., Pundir, P. S., Sigh, A. K., & Singh, A. (2022). Some inferences on reliability measures of two-non-identical units cold standby system waiting for repair. International Journal of System Assurance Engineering Management, 13, 172–188.
- Pham, H., & Pham, M. (1991). Optimal designs of (k, n-k+1)-out-of-n: F system (subject to 2 failure modes) optimal designs of (k, n-k+1)-out-of-n: F system (subject to 2 failure modes). IEEE Transactions on Reliability, 40(5), 559–562. https://doi.org/10.1109/24.106777
- Rasekhi, M., Saber, M. M., & Yousof, H. M. (2020). Bayesian and classical inference of reliability in multicomponent stress-strength under the generalized logistic model. Communications in Statistics-Theory and Methods, 50(21), 5114–5125. https://doi.org/10.1080/03610926.2020.1726958
- Shanthikumar, J. G., & Sumita, U. (1983). General shock models associated with correlated renewal sequences. Journal of Applied Probability, 20(3), 600–614. https://doi.org/10.2307/3213896
- Shanthikumar, J. G., & Sumita, U. (1984). Distribution properties of the system failure time in a general shock model. Advances in Applied Probability, 16(2), 363–377. https://doi.org/10.2307/1427074
- She, J., & Pecht, M. G. (1992). Reliability of a k-out-of-n warm-standby system. IEEE Transactions on Reliability, 41(1), 72–75. https://doi.org/10.1109/24.126674
- Shekhar, C., Kumar, N., Gupta, A., Kumar, A., & Varshney, S. (2020). Warm-spare provisioning computing network with switching failure, common cause failure, vacation interruption, and synchronized reneging. Reliability Engineering and System Safety, 199, 106910. https://doi.org/10.1016/j.ress.2020.106910
- Wang, K. H., & Chen, Y. J. (2009). Comparative analysis of availability between three systems with general repair times, reboot delay and switching failures. Applied Mathematics and Computation, 215(1), 384–394. https://doi.org/10.1016/j.amc.2009.05.023
- Wang, L., Wu, K., Tripathi, Y. M., & Lodhi, C. (2020). Reliability analysis of multicomponent stress–strength reliability from a bathtub-shaped distribution. Journal of Applied Statistics, 49(1), 122–142. https://doi.org/10.1080/02664763.2020.1803808
- Wu, Q. (2012). Reliability analysis of a cold standby system attacked by shocks. Applied Mathematics and Computation, 218(23), 11654–11673. https://doi.org/10.1016/j.amc.2012.05.051
- Wu, Q., & Wu, S. (2011). Reliability analysis of two-unit cold standby repairable systems under Poisson shocks. Applied Mathematics and Computation, 218(1), 171–182. https://doi.org/10.1016/j.amc.2011.05.089
- Wu, Q., Zhang, J., & Tang, J. (2015). Reliability evaluation for a class of multi-unit cold standby systems under Poisson shocks. Communications in Statistics-Theory and Methods, 44(15), 3278–3288. https://doi.org/10.1080/03610926.2013.851232
- Yang, D. Y., & Wu, C. H. (2021). Evaluation of the availability and reliability of a standby repairable system incorporating imperfect switchovers and working breakdowns. Reliability Engineering and System Safety, 207, 107366. https://doi.org/10.1016/j.ress.2020.107366