
ABSTRACT
Ongoing advancements in collision avoidance systems (CAS) for autonomous ships, built on diverse algorithms, have significantly enhanced performance. These systems, underpinned by a range of sophisticated algorithms, demonstrate increased accuracy in detecting potential collisions, quicker response times, and more reliable path prediction and avoidance maneuvers. Nevertheless, a prevalent trend in these systems is the insufficient consideration of the broader behavioral context of maritime navigation, especially for manned ships. The objective of this research is to present a methodology that can improve the capabilities of CAS in autonomous ships based on target ships’ maneuvering behaviors. This methodology will enable autonomous ships to respond adaptively to the actions of target ships, particularly manned ships, while also reacting to immediate environmental stimuli. The ultimate goal is to enhance the safety of navigation. This research utilizes information derived from simulated ship handling training, focusing on feature extraction within steering, spatial, and temporal elements. The tests prioritize the “Average Distance Deviation” metric for designing test scenarios. Simulation-based evaluation tests feature a velocity obstacle algorithm that discerns CAS action in single-ship crossing situations. The research reveals the potential of integrating behavioral dynamics into CAS, which enhances safety in autonomous maritime navigation and fosters a more integrated approach, where autonomous and manned ships coexist synergistically in shared environments.
Introduction
Recent advancements in maritime technology have significantly improved the collision avoidance systems (CAS) in autonomous ships (Zhang et al., Citation2021). These systems of autonomous ships have been improved through various algorithms and optimization, and their performance is very efficient in avoidance capabilities. A significant amount of research on collision avoidance for autonomous ships has incorporated the Closest Point of Approach (CPA) as a fundamental metric for situational assessment (Burmeister & Constapel, Citation2021; Chun et al., Citation2021). In addition, various algorithms, including Model Predictive Control (MPC) (Trym et al., Citation2020), Artificial Potential Field (APF) (Zhang et al., Citation2022), Long Short-Term Memory (LSTM) (Sawada et al., Citation2021), and Genetic Algorithms (GA) (He et al., Citation2021), have been utilized. Additionally, there is a focus on improving path planning methodologies using algorithms such as Velocity Obstacle (VO) (Shaobo et al., Citation2020), Rapidly-exploring Random Tree (RRT) (Chiang & Tapia, Citation2018), and A* (He et al., Citation2022). Furthermore, efforts have been made to integrate the International Regulations for the Prevention of Collisions at Sea (COLREGs) within these frameworks, ensuring compliance of autonomous ships with the same navigational rules as manned ships (Lyu & Yin, Citation2019; Zaccone, Citation2021).
However, despite these advancements, a critical limitation persists: these systems predominantly concentrate on current situational data, often neglecting the broader behavioral context in maritime navigation, especially in relation to manned ships (Huang et al., Citation2020; Lyu et al., Citation2023; Ni et al., Citation2022). In the predominantly manned maritime environment, autonomous ships mustcomprehend and interpret the behavioral dynamics of human-operated vessels (Statheros et al., Citation2008). Manned ships, steered by human navigators, display diverse navigational behaviors (Jiang et al., Citation2022). These behaviors are shaped by various factors such as the navigator’s experience, decision-making processes, and situational awareness (Huang et al., Citation2020). Presently, the collision avoidance algorithms in autonomous ships need to adequately consider this diversity, typically responding to immediate obstacles uniformly without accounting for the specific characteristics or historical trajectories of target ships.
Integrating historical behavioral data into collision avoidance strategies for autonomous ships holds significant potential for enhancing navigational safety and efficiency (Cho et al., Citation2018; Huang et al., Citation2020). Autonomous ships could achieve a more sophisticated and effective navigation strategy by processing and responding to the behavior dynamics based on the historical trajectories of manned ships. This development would lead to a more predictive and adaptive approach from the existing reactive models. Insights from simulated ship handling training, where diverse outcomes arise from varied navigator behaviors (Hwang et al., Citation2022), underscore the necessity for more adaptable collision avoidance systems. These training simulations provide a window into the extensive range of human navigational styles, offering valuable data for refining autonomous navigation systems.
This research is directed towards developing a collision avoidance system for autonomous ships that not only reacts to immediate environmental stimuli but also considers the behavior of target ships, particularly manned ships. The objective is to augment the safety of autonomous ships by enabling them to interact more effectively with traditional, human-operated vessels. This research aspires to contribute to the evolution of maritime navigation, fostering a more integrated and sophisticated approach where autonomous and manned ships can coexist and operate synergistically in shared maritime environments.
Methods
General
In this research, the authors used data generated in simulation ship handling training. The collected data underwent a meticulous process of refinement and filtering to ensure its suitability for detailed analysis. This process focused on isolating specific features relevant to ship maneuvering, and categorizing them into steering, spatial, and temporal domains. A particular emphasis was placed on spatial trajectory data, as it plays a crucial role in evaluating the maneuvering behavior of target ships. This simulation was conducted by examining the actions of CAS in response to the behavioral dynamics of target ships. The research predominantly focused on scenarios involving single-ship encounters in crossing situations, employing a Velocity Obstacle (VO) based algorithm to analyze and differentiate these encounters. VO algorithm is a computational method used for collision avoidance in dynamic environments. It calculates potential collision scenarios based on the velocity and trajectory of moving objects, enabling the prediction and avoidance of possible collisions by adjusting the course or speed of a ship (Öztürk et al., Citation2022). The research workflow, from the collection and preprocessing of data to the simulated experiment for evaluation, is shown in .
Figure 1. Research workflow.
Data collection and preprocessing
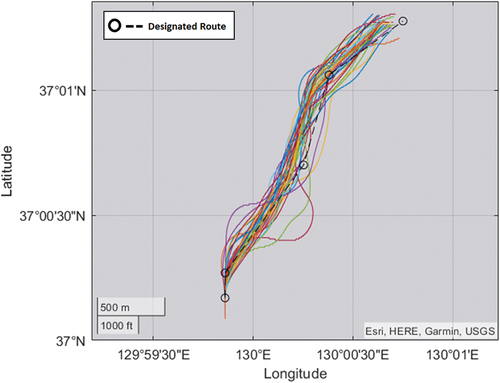
The ship handling training was conducted in a simulated environment. Participants were 75 trainee navigators, and only manual steering was allowed. For the simulation purpose, which was keeping the distance to the designated route as close as possible, a total of 224 simulations were carried out, and data were collected. The collected ship handling simulation data included “Time,” “Position,” Heaving,” “Yawing,” “Speed,” “Rate of turn,” and “Rudder angle.” shows designated navigation routes and result trajectories.
Figure 2. Ship handling simulation result trajectory on designated route.
Ship behavior feature extraction and selection
Features extracted from the simulation data are in three domains: the “Steering” domain, the “Spatial” domain, and the “Temporal” domain (Hwang, T & Youn, Citation2022). The extracted features are arranged in with specifications and units.
Table 1. Feature specification.
The most achievable feature of the three domains was trajectory-related data from the “Spatial” domain. When an autonomous ship encounters a target ship, its past trajectory could be used to determine the maneuvering behavior of the target ship. Considering this, the authors selected the “Average distance deviation” feature to design the test scenarios for evaluation.
Simulation configuration with scenario generation
The proposed method differentiates the action of CAS based on calculating the target ships’ maneuvering behaviors. In the feature analysis and application, the MATLAB environment was mainly used, including the parameter setting of the CAS, then the simulation was taken in the Robot Operating System (ROS) environment. In the ROS, VO-based algorithms were set as CAS for the test.
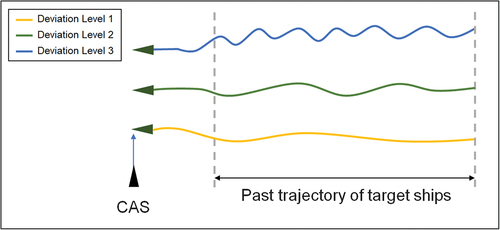
The crossing situation with a single-ship encounter was tested among the various navigational situations, considering the experiment condition restriction. depicts the scenario generation concept that differentiates past trajectories of target ships. Each past trajectory was divided into three distinct levels, represented by different colored lines to reflect scenarios 1, 2, and 3.
Figure 3. Simulation scenario concept.
Once the target ship’s past trajectory data are collected, the proposed CAS extracts each target ship’s behavior feature and average distance deviation. Upon the extracted feature, the algorithm determines the maneuvering behavior and adjusts avoidance sensitivity. In adjusting the sensitivity, the size of the buffer space area was changed to differentiate the reaction level. The working procedure of the proposed CAS is in .
Figure 4. Working procedure of the proposed CAS.

Results & discussion
Collected simulation data
Among the collected data, this research focused on refining achievable data from target ships to elaborate on the features used as criteria in judging the maneuvering behavior of target ships. The “Position” data were selected in Universal Transverse Mercator(UTM) format every 0.2 seconds. Since the experimental environment uses latitude and longitude input formats, the UTM formatted data were preprocessed and re-organized in seconds.
Ship behavior feature criteria
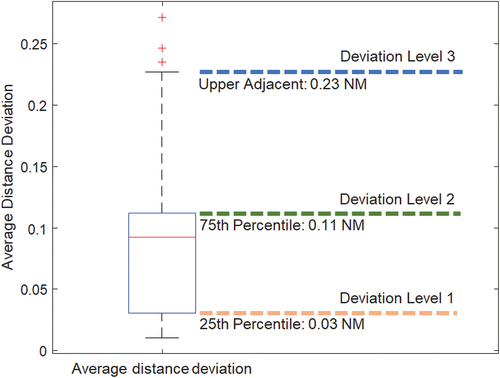
In determining whether the target ship behaves normally or abnormally, the selected feature was the “Average distance deviation.” As simulation training data has designated navigation routes to follow, the selected feature could show how the ship behaves, whether normally or abnormally. However, in the generation of the simulation scenario of the target ships’ movement, the middle line of the proceeding direction was taken as the designated route. In the differentiation of deviation levels, quantiles of boxplots were used as criteria. shows differentiated levels along the quantiles.
Figure 5. Differentiated levels in “average distance deviation”.
Result of evaluation simulation (comparison analysis: original and proposed CAS)
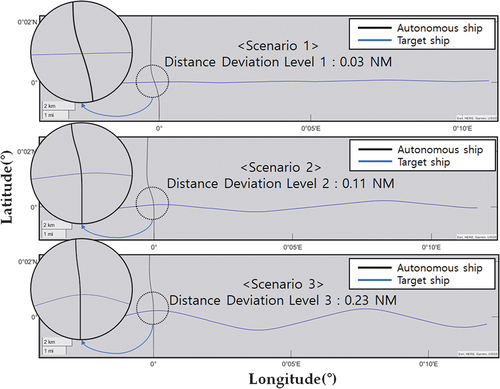
The simulation separated the CAS into two groups “original CAS” and “proposed CAS.” The “original CAS” refers to the traditional CAS based on the VO algorithm, while the “proposed CAS” represents a newly suggested system that dynamically responds based on the past trajectory of target ships. When the “original CAS” reacts to the target ship equally, the “proposed CAS” collects the past trajectory of the target ship before it arrives closely enough to avoid using the differentiated deviation levels shown in . Hence, the movement of the CAS ship leaves different trails along the determination of the target ship’s deviation levels. The “proposed CAS” adjusts the sensitivity level. As a result, the “original CAS” and the “proposed CAS” trajectories are shown in .
Figure 6. Simulation result for scenarios by”Original CAS”.
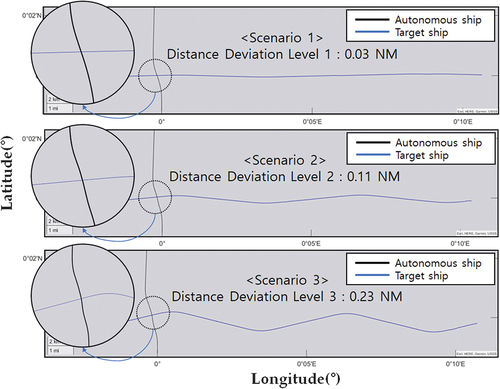
Figure 7. Simulation result for scenarios by”Proposed CAS”.
Comparison analysis of the results of original and proposed CAS
The trajectories in show how the “proposed CAS” reactions are differentiated. On the one hand, when other ship moves as the scenario 1, the “proposed CAS” applied the minimum a buffer level accepting other ship as the safe ship. On the other hand, in the scenario 3, the “proposed CAS” decided a buffer level as the maximum level considering other ship as the dangerously moving ship. This research used a minimum distance invasion rate to compare the results, defined as the counted number of the target ship’s trajectory points within the designated minimum distance area, which is a 0.5 NM radius from the autonomous ship. According to the results, the “proposed CAS” reduced the minimum distance invasion rate of scenario number 2 and 3. Since scenario number 1 used the same sensitivity level as the “original CAS” used, the outcome of the minimum distance invasion rate resulted in the same values. The specific results are arranged in and .
Table 2. Comparative analysis of minimum distance invasion.
Figure 8. Simulation result of minimum distance invasion rate for”Original CAS”.
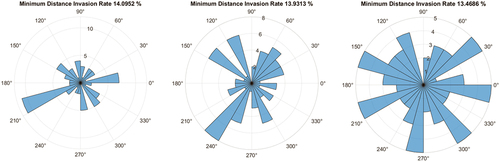
Figure 9. Simulation result of minimum distance invasion rate for”Proposed CAS”.
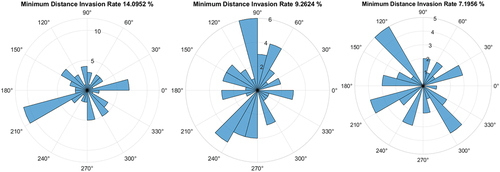
Results in denote that this research’s “proposed CAS” took more efficient movement and led to less invasion of target ships, as shown in .
In order to visualize how the “original CAS” and “proposed CAS” moved differently, shows the compared heading angle variation of both CASs, in colored yellow for the “original CAS” and purple for the “proposed CAS”.
Figure 10. Differentiated heading angle of “original CAS” and “proposed CAS.”.
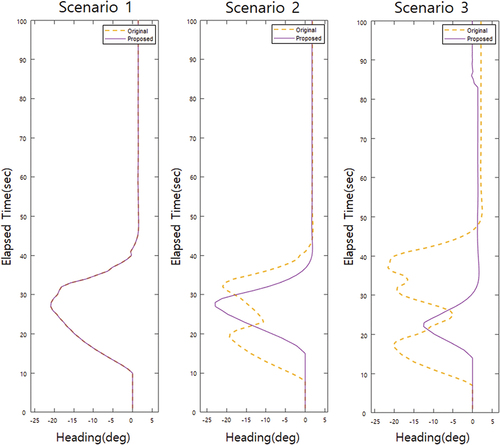
shows the decision differentiation made by both CASs. In scenario 2, in which the target ship had a medium distance deviation, the “proposed CAS” took later movement when the “original CAS” made early and rapid movement twice. The same result is shown in scenario 3, showing immediate reaction could lessen the efficiency of heading movement and the safety level at the same time. These results denote the anxiety of the autonomous ships among the dominant number of manned ships, which increase the disorder of navigation context. Consequently, the “proposed CAS” depicts the adaptive CAS could enhance the safety even in the simple simulation tests.
Conclusion
-This research addressed the limitations of current collision avoidance systems (CAS) in autonomous ships, specifically their reliance on immediate environmental data and the underestimation of the behavioral characteristics of manned ships. Regarding the lack of previous research that applies adaptive decision-making, the proposed approach aims to enhance navigational safety by examining and integrating the past trajectory data of nearby ships into the CAS.
This approach demonstrated the potential for a more integrated operational framework between autonomous and manned ships. However, the research acknowledges limitations in data scope and scenario specificity, suggesting future work to encompass a broader range of maritime conditions and diverse behavioral patterns to enhance the safety and efficiency of navigation context.
Acknowledgments
This research was supported by the ‘Development of Autonomous Ship Technology (20200615)’ funded by the Ministry of Oceans and Fisheries (MOF, Korea)
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Burmeister, H. C., & Constapel, M. (2021). Autonomous collision avoidance at sea: A survey. Frontiers in Robotics and AI, 8, 1. https://doi.org/10.3389/frobt.2021.739013
- Chiang, H. T. L., & Tapia, L. (2018). COLREG-RRT: An RRT-based COLREGS-compliant motion planner for surface vehicle navigation. IEEE Robotics and Automation Letters, 3(3), 2024–8. https://doi.org/10.1109/LRA.2018.2801881
- Cho, Y., Han, J., & Kim, J. (2018). Intent inference of ship maneuvering for automatic ship collision avoidance. IFAC-Papersonline, 51(29), 384–388. https://doi.org/10.1016/j.ifacol.2018.09.457
- Chun, D. H., Roh, M. I., Lee, H. W., Ha, J., & Yu, D. (2021). Deep reinforcement learning-based collision avoidance for an autonomous ship. Ocean Engineering, 234, 109216. https://doi.org/10.1016/j.oceaneng.2021.109216
- He, Y., Li, Z., Mou, J., Hu, W., Li, L., & Wang, B. (2021). Collision-avoidance path planning for multi-ship encounters considering ship manoeuvrability and COLREGs. Transportation Safety and Environment, 3(2), 103–113. https://doi.org/10.1093/tse/tdab004
- He, Z., Liu, C., Chu, X., Negenborn, R. R., & Wu, Q. (2022). Dynamic anti-collision A-star algorithm for multi-ship encounter situations. Applied Ocean Research, 118, 102995. https://doi.org/10.1016/j.apor.2021.102995
- Huang, Y., Chen, L., Chen, P., Negenborn, R. R., & Van Gelder, P. H. A. J. M. (2020). Ship collision avoidance methods: State-of-the-art. Safety Science, 121, 451–473. https://doi.org/10.1016/j.ssci.2019.09.018
- Huang, Y., Chen, L., Negenborn, R. R., & Van Gelder, P. H. A. J. M. (2020). A ship collision avoidance system for human-machine cooperation during collision avoidance. Ocean Engineering, 217, 107913. https://doi.org/10.1016/j.oceaneng.2020.107913
- Hwang, H., Hwang, T., & Youn, I. H. (2022). Effect of onboard training for improvement of navigation skill under the simulated navigation environment for maritime autonomous surface ship operation training. Applied Sciences, 12(18), 9300. https://doi.org/10.3390/app12189300
- Hwang, T., & Youn, I. H. (2022). Difficulty evaluation of navigation scenarios for the development of ship remote operators training simulator. Sustainability, 14(18), 11517. https://doi.org/10.3390/su141811517
- Jiang, L., An, L., Zhang, X., Wang, C., & Wang, X. (2022). A human-like collision avoidance method for autonomous ship with attention-based deep reinforcement learning. Ocean Engineering, 264, 112378. https://doi.org/10.1016/j.oceaneng.2022.112378
- Lyu, H., Hao, Z., Li, J., Li, G., Sun, X., Zhang, G., Yin, Y., Zhao, Y. , and Zhang, L. (2023). Ship autonomous collision-avoidance strategies—A comprehensive review. Journal of Marine Science and Engineering, 11(4), 830. https://doi.org/10.3390/jmse11040830
- Lyu, H., & Yin, Y. (2019). COLREGS-constrained real-time path planning for autonomous ships using modified artificial potential fields. The Journal of Navigation, 72(3), 588–608. https://doi.org/10.1017/S0373463318000796
- Ni, S., Wang, N., Li, W., Liu, Z., Liu, S., Fang, S., & Zhang, T. (2022). A deterministic collision avoidance decision-making system for multi-MASS encounter situation. Ocean Engineering, 266, 113087. https://doi.org/10.1016/j.oceaneng.2022.113087
- Öztürk, Ü., Akdağ, M, and Ayabakan, T. (2022). A review of path planning algorithms in maritime autonomous surface ships: Navigation safety perspective. Ocean Engineering, 251, 111010. https://doi.org/10.1016/j.oceaneng.2022.111010
- Sawada, R., Sato, K., & Majima, T. (2021). Automatic ship collision avoidance using deep reinforcement learning with LSTM in continuous action spaces. Journal of Marine Science and Technology, 26(2), 509–524. https://doi.org/10.1007/s00773-020-00755-0
- Shaobo, W., Yingjun, Z., & Lianbo, L. (2020). A collision avoidance decision-making system for autonomous ship based on modified velocity obstacle method. Ocean Engineering, 215, 107910. https://doi.org/10.1016/j.oceaneng.2020.107910
- Statheros, T., Howells, G., & Maier, K. M. (2008). Autonomous ship collision avoidance navigation concepts, technologies and techniques. The Journal of Navigation, 61(1), 129–142. https://doi.org/10.1017/S037346330700447X
- Trym, T., Brekke, E. F., & Johansen, T. A. (2020). On collision risk assessment for autonomous ships using scenario-based MPC. IFAC-Papersonline, 53(2), 14509–14516. https://doi.org/10.1016/j.ifacol.2020.12.1454
- Zaccone, R. (2021). COLREG-compliant optimal path planning for real-time guidance and control of autonomous ships. Journal of Marine Science and Engineering, 9(4), 405. https://doi.org/10.3390/jmse9040405
- Zhang, G., Han, J., Li, J., & Zhang, X. (2022). APF-based intelligent navigation approach for USV in presence of mixed potential directions: Guidance and control design. Ocean Engineering, 260, 111972. https://doi.org/10.1016/j.oceaneng.2022.111972
- Zhang, X., Wang, C., Jiang, L., An, L., & Yang, R. (2021). Collision-avoidance navigation systems for maritime autonomous surface ships: A state of the art survey. Ocean Engineering, 235, 109380. https://doi.org/10.1016/j.oceaneng.2021.109380