

ABSTRACT
In this study, a novel algorithm for cylinder-based registration and model fitting of laser-scanned point clouds was proposed. The algorithm was designed specifically for as-built modeling of a plant piping system. In contrast with Iterative Closest Point (ICP)-based methods, fine registration and model fitting were performed simultaneously, by solving a single nonlinear constraint equation. This prevented alignment error arising in registration from propagating to model fitting. Coarse registration was automated by identifying cylindrical surfaces and by finding matches among their cylinder axes using a random sample consensus (RANSAC) method. The accuracy and robustness of the proposed algorithm was first confirmed using scan simulations. It performed well even when there was zero overlap between scans, and was demonstrated to achieve better modeling accuracy than ICP-based methods. The algorithm was then applied to point clouds scanned from a real plant, with successful results. The proposed algorithm achieves as-built modeling accuracies that would be fully acceptable when conducting renovation work on existing piping systems.
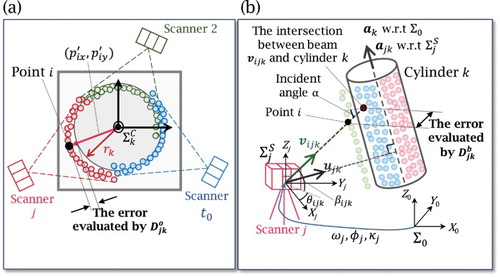
GRAPHICAL ABSTRACT
ORCID
Ryota Moritani http://orcid.org/0000-0001-5051-7890
Satoshi Kanai http://orcid.org/0000-0003-3570-1782
Hiroaki Date http://orcid.org/0000-0002-6189-2044
Masahiro Watanabe http://orcid.org/0000-0003-2486-7648
Takahiro Nakano http://orcid.org/0000-0002-6946-5629
Yuta Yamauchi http://orcid.org/0000-0003-0289-8398