

ABSTRACT
Two parameters, voltage and frequency, are required for smooth delivery of quality power to consumer. Therefore, in this paper enhancement of frequency and voltage stability of multi microgrid system with a proposed hybrid fuzzy logic controller with two-degree of freedom tilt-integral derivative with filter (2DOFTIDFFUZZY) are analyzed. A novel algorithm known as artificial electric field algorithm (AEFA) technique is employed to obtain optimal controller parameters. Firstly, a two-area system widely used in literature is considered for proper comparison. Efficacy of 2DOFTIDFFUZZY controller is confirmed by comparing it with different controllers for the same system. Further, a multi microgrid system is considered for unified voltage-frequency control. Automatic Voltage Regulator (AVR) effect states a substantial improvement in system dynamics with the proposed controller. Under different unfavorable conditions like source and load variation, dynamic system performances are studied to enlighten robustness of proposed controller. Simulation results elucidate that proposed 2DOFTIDFFUZZY controller optimized with AEFA technique can achieve better system stability in case of any vulnerability.
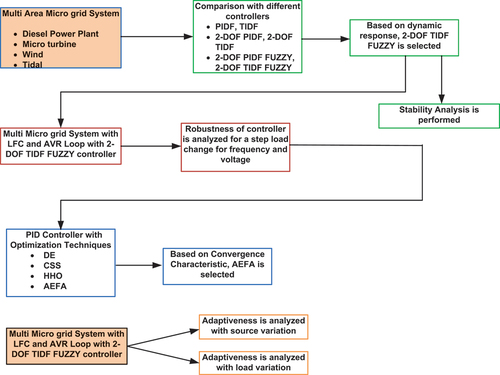
Graphical abstract
Disclosure statement
No potential conflict of interest was reported by the author(s).
Nomenclatures
| ‘∆f1,∆f2 | = | Frequency deviation in area-1 and area-2, |
| ∆Ptie | = | Tie-line power deviation between area-1 and area-2, |
| V1 | = | Terminal voltage of generator at area-1, |
| ∆δ | = | Change in Rotor angle, |
| ∆Pw | = | Change in Wind power output, |
| ∆Pm | = | Change in Microturbine power output, |
| ∆PDE | = | Change in Diesel Engine power output, |
| ∆PT | = | Change in Tidal power output, |
| ∆Pmech | = | Change in mechanical power input/turbine power. |
| KP1, KI1, KD1 | = | PID controller gain parameters for area-1 |
| KP2, KI2, KD2 | = | PID controller gain parameters for area-2 |
| N1, N2 | = | Filter coefficients for area-1 and area-2 |
| n1, n2 | = | Tilted fraction coefficient for area-1 and area-2 |
| PW1, DW1 | = | Set point weightage for P and D controller in area-1 |
| PW2, DW2 | = | Set point weightage for P and D controller in area-2 |
| KPA1, KIA1, KDA1 | = | PID controller gain parameters of AVR for area-1 |
| KPA2, KIA2, KDA2 | = | PID controller gain parameters of AVR for area-2’ |
| J | = | Objective function |
Supplementary material
Supplemental data for this article can be accessed online at https://doi.org/10.1080/23080477.2023.2297550