
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.OCCUPATIONAL APPLICATIONS
“Overassistive” robots can adversely impact long-term human-robot collaboration in the workplace, leading to risks of worker complacency, reduced workforce skill sets, and diminished situational awareness. Ergonomics practitioners should thus be cautious about solely targeting widely adopted metrics for improving human-robot collaboration, such as user trust and comfort. By contrast, introducing variability and adaptation into a collaborative robot’s behavior could prove vital in preventing the negative consequences of overreliance and overtrust in an autonomous partner. This work reported here explored how instilling variability into physical human-robot collaboration can have a measurably positive effect on ergonomics in a repetitive task. A review of principles related to this notion of “stimulating” robot behavior is also provided to further inform ergonomics practitioners of existing human-robot collaboration frameworks.
TECHNICAL ABSTRACT
Background: Collaborative robots, or cobots, are becoming ubiquitous in occupational settings due to benefits that include improved worker safety and increased productivity. Existing research on human-robot collaboration in industry has made progress in enhancing workers’ psychophysical states, by optimizing measures of ergonomics risk factors, such as human posture, comfort, and cognitive workload. However, short-term objectives for robotic assistance may conflict with the worker’s long-term preferences, needs, and overall wellbeing.
Purpose: To investigate the ergonomic advantages and disadvantages of employing a collaborative robotics framework that intentionally imposes variability in the robot’s behavior to stimulate the human partner’s psychophysical state.
Methods: A review of “overassistance” within human-robot collaboration and methods of addressing this phenomenon via adaptive automation. In adaptive approaches, the robot assistance may even challenge the user to better achieve a long-term objective while partially conflicting with their short-term task goals. Common themes across these approaches were extracted to motivate and support the proposed idea of stimulating robot behavior in physical human-robot collaboration.
Results: Experimental evidence to justify stimulating robot behavior is presented through a human-robot handover study. A robot handover policy that regularly injects variability into the object transfer location led to significantly larger dynamics in the torso rotations and center of mass of human receivers compared to an “overassistive” policy that constrains receiver motion. Crucially, the stimulating handover policy also generated improvements in widely used ergonomics risk indicators of human posture.
Conclusions: Our findings underscore the potential ergonomic benefits of a cobot’s actions imposing variability in a user’s responsive behavior, rather than indirectly restricting human behavior by optimizing the immediate task objective. Therefore, a transition from cobot policies that optimize instantaneous measures of ergonomics to those that continuously engage users could hold promise for human-robot collaboration in occupational settings characterized by repeated interactions.
1. Introduction
Collaborative robots, or cobots, are a promising technology for the future of industry. These robots assist human workers in a shared task by adapting to the workplace environment, task requirements, and workers’ needs. The adoption of cobots has been shown to reduce work-related injuries in occupational settings, such as the U.S. and German manufacturing sectors (Gihleb et al., Citation2022). Cobots have also led to improvements in productivity by enabling workers to be redeployed to a higher-value-added task (Franklin et al., Citation2020) or by reducing human error during monotonous jobs (Gihleb et al., Citation2022), such as quality assurance in personal and protective equipment testing (Shaham et al., Citation2022).
One typical cobot scenario in industry is robot-to-human handover. In this scenario, the cobot helps a worker lift packages or other heavy loads to alleviate the risk of work-related musculoskeletal disorders (MSDs) caused by repetitive or non-neutral body motion (Schneider et al., Citation2010). The robot assists in the handover by determining an object transfer point (OTP) to optimize one or more indicators of ergonomics (Ortenzi et al., Citation2021). Ergonomics indicators are components of workplace processes that can be used to quantify the ergonomics risk systematically and periodically along these processes (Sarbat & Ozmehmet Tasan, Citation2022). These indicators can encompass static and dynamic risk factors in ergonomics, such as the effects of human posture and joint velocities on the incidence of MSDs, respectively (Maurice et al., Citation2017).
Within the robotics literature, there is a diverse array of common variables considered in ergonomics cost functions when selecting an OTP for robot-to-human handover (Ortenzi et al., Citation2021). These variables often capture properties on the safety, comfort, and acceptability for the human receiver, where the aim is to pick a handover location that maximizes these properties to decrease MSD risks (Busch et al., Citation2017; Parastegari et al., Citation2017; Ortenzi et al., Citation2021). However, when choosing an OTP to maximize a property, like acceptability, the optimal OTP is often a single repeated point across handovers. This forces the receiver to perform repetitive behaviors, which leads to a suppression of their natural movement variability. Suppressing variability in receiver movement through the cobot’s assistance is problematic, as whole-body motion variability during object handover exchanges is recognized as an effective intervention against MSDs (Mathiassen et al., Citation2003; Srinivasan & Mathiassen, Citation2012).
In light of this perspective on variability, our prior work on robot-to-human handover developed a method to intentionally “stimulate” the receiver’s motion (Zolotas et al., Citation2022). Specifically, we conducted a user study to compare this stimulating handover policy against a traditional assistive control mode. The stimulating handover policy resulted in enhanced ergonomics scores based on risk assessments of receiver posture using the Rapid Entire Body Assessment (REBA) instrument (Hignett & McAtamney, Citation2000). The current report expands on the cobot framework presented in the earlier Zolotas et al. (Citation2022) study, by extending the experimental results to include new ergonomic indices, including velocity and jerk in receiver movement. Moreover, we explore the related concept of “overassistive” cobots, which we regard as collaborative autonomous agents with a behavior policy focused entirely on optimizing an objective function for immediate task assistance. We also discuss the significance of conducting longitudinal studies on human-robot collaboration frameworks in occupational settings. The overarching goal of the current study was to provide further insight into how an adaptive cobot that induces motor variability in its human partner compares to an overassistive cobot, particularly when considering ergonomics during extended interactions, like repeated robot-to-human handovers.
2. Background and Motivation
In human factors research, the importance of straying away from prescribed movement and enabling free motion is often highlighted for its benefits on motor variability (Stapley et al., Citation1999; Mathiassen et al., Citation2003; Srinivasan & Mathiassen, Citation2012). Our recent study probed this concept in the context of robot-to-human handovers by injecting variability into the cobot behavior, hence “stimulating” receiver motion (Zolotas et al., Citation2022). In this section, we first examine the occurrence of motor variability in the workplace to better understand its influences on worker wellbeing and productivity, specifically when the worker’s task is repetitive. We then review “overassistance” in human-robot collaboration, discussing its hindrances on motor variability and the ergonomics of workplace processes. Methods of mitigating overassistance will also be provided to motivate the cobot framework depicted in Section 3.
2.1. Motor Variability in the Workplace
Repetitive movements constitute a major risk factor for occupational MSDs in regions of the human body, such as the neck, shoulders, and arms (Luttmann et al., Citation2003; Srinivasan & Mathiassen, Citation2012). Consequently, motor variability is frequently investigated in the workplace, with stimulated movement hypothesized to be less restraining and less likely to incur MSDs in the workforce population (Punnett & Wegman, Citation2004). For example, active workstations that prevent prolonged static posture (e.g., standing or treadmill desks) potentially have a range of biomechanical and physiological benefits (Dupont et al., Citation2019). While these workstations offer a promising ergonomic solution for many occupational roles associated with sedentary behavior, the outcomes of their long-term usage require further scrutiny (Dupont et al., Citation2019).
A longitudinal perspective on motor variability during repetitive work was obtained from a study that analyzed the arm, trunk, and electromyography variability of butchers performing cutting tasks over a 6-month period (Madeleine et al., Citation2008). The focus of this study was to observe the effects of employment duration and pain development on motor patterns, where variability between experienced and inexperienced butchers was compared. The results demonstrated that experienced butchers had greater motor variability than inexperienced butchers, yet as novices approached the end of the 6-month experiment duration, they exhibited more variability in the presence of sub-chronic neck-shoulder pain. The authors concluded that the lack of motor variability in repetitive tasks leads to work-related MSDs over time.
Another study evaluated the variability of exposure to physical risk factors within and between operators when executing a truck assembly task (Zare et al., Citation2018). The aim of this study was to assess the potential reduction in work-related MSDs resulting from variations in operator strategies. Depending on the operational leeway in operator strategies allowed by companies, the authors observed two extremes. Firstly, manufacturers that strive for higher production levels by heavily enforcing standardized task operation and disabling operational leeway face the risk of causing musculoskeletal problems due to the repetition of tasks without variation. In contrast, companies that are too lenient in enabling operators to have more variability in tasks could lead to workers overexposing themselves to risks. The fundamental challenge is to then find a reasonable compromise between standardization of operation and allowed variability in operators, which will attain high production quality and reduce physical risk factors.
2.2. “Overassistive” Collaborative Robots
By our definition, “overassistive” cobots repeatedly select assistive actions according to a policy that optimizes for a short-term task objective. Although reliable and consistent, these cobots can have negative repercussions on human partners by neglecting to consider off-policy behaviors that may yield long-term advantages (Parasuraman & Riley, Citation1997). In occupational settings, “overassistive” action-selection can build overreliance and/or overtrust in human workers, which may gradually lead to complacency, skill degradation, and diminished situational awareness (Parasuraman et al., Citation2007; Onnasch et al., Citation2014). The following describes how cobots exhibit overassistance and how adaptive automation offers a favorable alternative.
In industrial cobot frameworks, a common strategy is to first define one or more ergonomics metrics, and then to frame these metrics as an optimization problem to find an “optimal” control strategy (Busch et al., Citation2017; Maurice et al., Citation2017; Kim et al., Citation2019; Shafti et al., Citation2019; Fortini et al., Citation2020). A range of ergonomics indicators can be derived from a human’s biomechanical and/or cognitive state, including rotational head movement, dynamic balance, joint torque, human posture, fatigue, stress levels, and so forth (Maurice et al., Citation2017; Kim et al., Citation2019; Merlo et al., Citation2023). The robot’s cost function can then be expressed as either a single ergonomics indicator or a weighted sum of multiple indicators. Optimizing this cost function results in a cobot control policy that is intended to guide the human’s biomechanical state into an “optimal” configuration. For instance, Kim et al. (Citation2019) employed a control module for a robotic arm, where the robot’s planned path approached a destination pose corresponding to the optimal posture configuration, as determined by the human partner’s joint torques and base of support.
While these optimization formulations are effective for short-term human-robot exchanges, the cobot’s behavior may be liable to overassistance. This outcome primarily stems from the fact that most ergonomics metrics are based on kinematic descriptions of the human’s biomechanical state, e.g., body posture (Hignett & McAtamney, Citation2000). As a result, the human’s dynamics (e.g., joint velocities) and the associated risks on ergonomics are not necessarily taken into account (Maurice et al., Citation2017; Merlo et al., Citation2023). Dynamic measurements in ergonomics indicators play a pivotal role when evaluating the efficacy of a cobot’s actions on the human’s state beyond the current instant (Maurice et al., Citation2017). If the optimal control policy is obtained solely from static ergonomic metrics within a single work cycle, then temporal risk factors, such as task repetitiveness or duration, will go undetected (Merlo et al., Citation2023). Furthermore, kinematic-only control policies are more likely to constrain joint and center of mass displacement, which is unnatural for whole-body human motion (Commissaris et al., Citation2001).
To overcome the risk of constraining human motion via an overassistive control policy, the cobot behavior can instead opt to impose variability in their human partner’s movement. An interesting research question that arises in such collaborations is whether a robot’s control policy should continuously adapt to the human partner, or whether it should remain fixed (Ajoudani et al., Citation2018). In the former case, the human partner is forced to keep re-adapting to the changing robot policy, while the latter enables the human to swiftly learn the robot’s capabilities. However, long-term human-robot collaborations under the latter scheme could lead to complacency, or worse, a decline in human capabilities (Parasuraman et al., Citation2007).
The essential idea behind the cobot policy that we present here and in our earlier work (Zolotas et al., Citation2022) is to thus favor variable robot behavior whenever the collaboration consists of repeated work cycles. One simple means of bestowing variability in the robot’s control policy is to inject noise into the behavior, under the constraint that robot motion always preserves human safety. In the next section, we exemplify how this can prove effective through a robot-to-human handover use-case.
3. Methods
In the current work, we extend the results of our recent robot-to-human handover study, which was motivated by the relevant literature on inciting motor variability to deter overassistance in human-robot collaboration (Zolotas et al., Citation2022). Here, we place emphasis on evaluating the study’s data for ergonomics indicators with dynamic risk factors, such as smoothness in receiver movement. We first introduce the cobot’s method of eliciting motor variability in human receivers. The earlier study’s experimental setup is then summarized. Lastly, a new set of metrics and experiment hypotheses will be introduced to tease out the potential ergonomics benefits of the cobot framework proposed in Zolotas et al. (Citation2022).
3.1. Stimulating Robot-to-Human Handover
In robot-to-human handover, a cobot helps a human partner lift packages or other heavy loads to mitigate the risk of injury. The traditional perception-action cycle of robot-to-human handover begins with the cobot estimating the receiver’s biomechanical properties (e.g., joint angles), then computing an ergonomics indicator according to these properties, such as a REBA score (Hignett & McAtamney, Citation2000), and finally selecting an OTP to improve this indicator (Ortenzi et al., Citation2021). The following briefly describes two robot handover policies that adhere to this cycle: Assistive and Stimulating. These policies can be seen as overassistive and motion-triggering forms of cobot handover behavior, respectively.
To produce an estimate of the receiver’s biomechanical features, we require accurate real-time 3D position estimation of multiple body segments. Many contemporary works use full-body motion capture systems to estimate these body segment positions (van der Spaa et al., Citation2020). In contrast, markerless vision-based approaches that use RGB-D cameras are often cheaper, easier to configure, and less invasive on the worker, therefore providing a suitable fit for regular work environments. We opt for a vision-based tracking method to estimate body joint poses from an RGB camera (Bazarevsky et al., Citation2020).
Our handover methods utilize two essential kinematic parameters of a human receiver: the whole-body center of mass (CoM) and the base of support (BoS). To estimate CoM in real-time, a human’s body can be approximated as a system of particles, with each particle representing a body segment (Eng & Winter, Citation1993). Each body segment is assigned a percentage of body mass, such that the CoM is the weighted average of all segment positions using segment masses as weights (Plagenhoef et al., Citation1983; Eng & Winter, Citation1993). To account for the mass of the package being lifted, hands can be assigned different masses before and after handover. For the BoS, the area beneath the person that includes every point of contact made with the ground can be approximated as the convex hull between the left and right heels, and the intersection of the first toe tips with each foot’s outermost toe edges (see ).
Figure 1. Two handover policies to govern the collaborative robot’s behavior. The arrows indicate the Object Transfer Point (OTP) from one handover to the next, as well as the intended motion of the human subject’s center of mass (CoM) around their base of support (BoS).
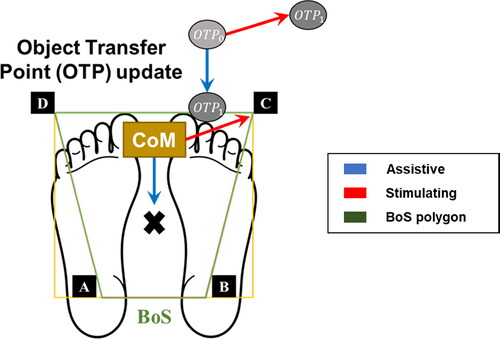
Numerous prior studies focused on human biomechanics to determine “optimal” OTPs, where the deviation of a receiver’s CoM is minimized while maintaining it within their BoS (Peternel et al., Citation2017; Kim et al., Citation2019). However, constraining whole-body movement is unnatural for humans (Commissaris et al., Citation2001). Zolotas et al. (Citation2022) posited that provoking posture variability leads to handovers with better ergonomics indicator scores as movement constraints are relaxed. To explore this claim, two handover policies were developed: Assistive and Stimulating. The OTP selection in the two modes is shown in . Given the current transfer point, OTP0, the Assistive mode selected the next transfer point, OTP1, to shift the human receiver’s CoM further inside the BoS polygon. More specifically, the handover pushed the human’s CoM toward the BoS polygon’s centroid marked by the cross. The Stimulating mode instead chose the next transfer point, OTP1, based on a randomly selected BoS corner (e.g., C), such that the human receiver’s CoM moved momentarily outside the BoS polygon.
3.2. Experiment Setup & Protocol
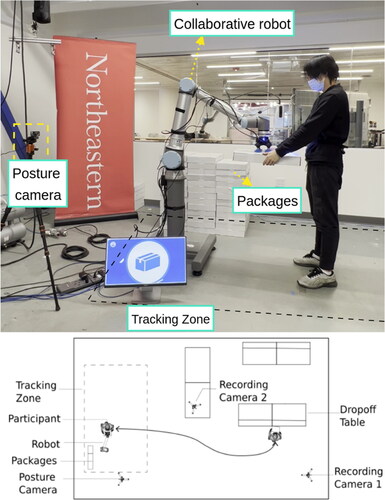
We conducted a within-subjects experiment to investigate whether the Stimulating handover policy could encourage a human worker to be more attentive and cognizant of their posture during human-robot handover than with the Assistive handover mode. The experiment emulated industrial pick-and-place tasks, such as in seafood processing (), by having participants retrieve packages from the end-effector of a long-reaching robotic arm and then carry these packages over to a drop-off location, roughly 4 m away from the package exchange region. The overall experimental setup is illustrated in . For each handover, the robotic arm picked up a 6.8 kg package from a pile and held the package at an OTP for the receiver to collect it. Before participants performed the experiment, they familiarized themselves with the task by performing a Training session that involved seven package handovers, where the robot always selected the same OTP.
Figure 2. Workers packaging and transferring boxes of seafood in a seafood processing facility.

Figure 3. Experimental setup. Top: an overview of how the collaborative robot exchanges packages with a user while human posture is tracked by an external camera. Bottom: a top-down perspective of the experiment workspace.
A total of 16 participants (6 female, 10 male) were recruited from the Northeastern University student community, as well as the MassRobotics facility in Boston, MA where the experiment was situated. The subjects were young (aged 20-34, median 23) and predominantly had some experience working on robots, with 75% of the subject pool claiming prior experience in a survey question. presents an overview of the subject pool. The study reported here was reviewed and approved by Northeastern University Institutional Review Board (#19-06-14), and participants provided their written informed consent. Interested readers are encouraged to refer to Zolotas et al. (Citation2022) for more details on the experiment design and procedures.
Table 1. Demographic information of the robot-to-human handover study participants. Entries are means (SD).
3.3. Evaluation Metrics
We asked subjects to perform multiple repeated handovers per experiment mode in order to discern the prolonged effects on human posture and other ergonomics risk factors. Participants engaged in 39 package handovers with the cobot per control mode, which took a mean (SD) of 7.93 (1.12) minutes to complete. The order of experiment modes was randomized and then counterbalanced across participants to ensure each possible order was presented to an equal number of participants. Subjects were allowed a break when switching experiment modes and were unaware of how/whether the robot control policies differed between the two trials.
In our previous work (Zolotas et al., Citation2022), we reported on three quantitative metrics to assess the ergonomic quality of subject handovers: REBA scores, CoM displacements, and torso rotation angles. We elected the REBA scale (Hignett & McAtamney, Citation2000), as it is pervasively used to score whole-body posture ergonomics in robot-to-human handover (Busch et al., Citation2017; Shafti et al., Citation2019; Ortenzi et al., Citation2021). CoM displacements and torso rotation angles were also evaluated to capture the extent of unconstrained receiver movement (Stapley et al., Citation1999). All three metrics were calculated from joint poses detected using an external camera (see ). Other dependent measures included user-reported workload via NASA-TLX (Hart & Staveland, Citation1988), as well as post-experiment survey responses on frustration, alertness, and preference between the two control modes. The post-experiment survey questions were structured as comparisons, for example: “Which mode did you feel more alert during? (Mode 1, Mode 2, or No difference)”.
This report augments our prior quantitative analyses with three new ergonomics indicators: instantaneous velocity in CoM, jerk in CoM motion, and the balance stability margin. Second-order central differences of CoM position data were used to approximate velocity within a handover exchange. Here, we replace CoM displacements for velocities in our analysis to better represent the dynamic demands on participants (Maurice et al., Citation2017). Jerk is also computed using the mean squared measure provided in Hogan and Sternad (Citation2009) to express smoothness in receiver movement. The balance stability margin is then evaluated as the squared distance between the CoM and BoS edges. Margin of stability is a widely used objective measure of dynamic stability in human movement (Watson et al., Citation2021). Finally, we report on the coefficient of variation for recorded REBA scores and the mean proportion of a trial that receivers’ body postures spent in a “high risk” state for MSDs, as classified by the REBA tool (Hignett & McAtamney, Citation2000).
3.4. Experiment Hypotheses
The following experimental hypotheses were tested in this work:
H1: Stimulating mode will increase human receiver movement variability, as measured by CoM velocities and torso rotations.
H2: Stimulating mode will yield less ergonomics risk on body posture based on the REBA and balance stability margin measures.
H3: No difference in smoothness of receiver movement will be observed between the Assistive and Stimulating modes, as signified by CoM jerk.
Treating the cobot’s handover policy as the independent variable (within-subjects factor), either two-tailed paired-samples t-tests or Wilcoxon signed-rank tests were performed on the dependent variables. If the dependent data fulfilled the normality assumption (Shapiro-Wilk test) and the sphericity assumption (Mauchly’s test), then two-tailed paired-samples t-tests were conducted. Only REBA and torso rotations met these assumptions. For the other measures, Wilcoxon signed-rank tests were utilized.
4. Results
With regards to movement variability, the Stimulating mode elicited higher maximum torso rotation angles and larger CoM velocities than those of the Assistive condition, supporting H1. A paired-samples t-test showed a significant effect of the robot control mode on maximum torso angle , with larger angles observed for the Stimulating mode. Velocity estimates for subjects’ CoM between handover policies were also shown to be significantly different via a Wilcoxon signed-rank test
. illustrates CoM velocities averaged across all participants per handover. A related measure to velocity is jerk, which had a strong significant effect depending on the handover policy according to the Wilcoxon signed-rank test
. This result does not align with H3, as smoothness of receiver movement was found to be jerkier when exposed to the Stimulating condition (see ). The raw quantitative measures used to produce the above observations are presented in .
Figure 4. Box plots of the mean squared velocity and jerk values of participants’ Center of Mass (CoM) per handover.
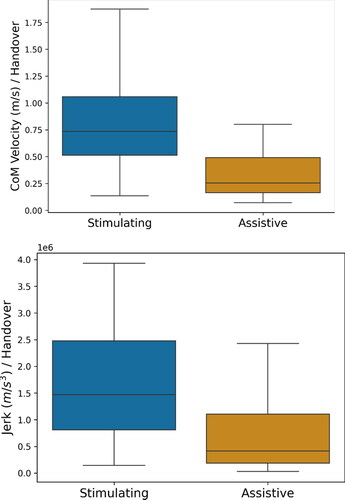
Table 2. Aggregate statistics per handover of participants’ center of mass (CoM) velocities, torso rotation angles, and jerk in movement.
In terms of the subject’s postural state, the Stimulating mode nudged subjects toward improved ergonomic posture measures. A significant main effect on REBA was found using a paired-samples t-test , with Stimulating acquiring lower scores than Assistive, where smaller values are preferable (). Not only were the REBA scores lower on average, but the percentage of data samples that possessed a REBA score greater than 7 (referred to as a “high risk” REBA score), was also lowest for the Stimulating condition. This reduction was even more pronounced than when subjects lifted packages during the initial Training session. By contrast, a Wilcoxon signed-rank test showed no significant effect between handover policies on the balance stability margin measure
, thereby only partially supporting H2. outlines the above results and illustrates a trend toward higher margins for the Stimulating condition, with larger values suggesting enhanced postural stability.
Figure 5. Box plot of the balance stability margins averaged across participant handovers. Larger values signify a more stable posture configuration.
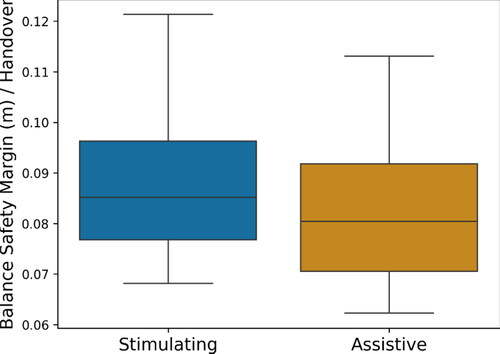
Table 3. Mean and standard deviations per handover of Rapid Entire Body Assessment (REBA) scores for all samples collected across the three experimental conditions.
One of the key underlying reasons for promoting motion variability in workers is to elevate their alertness levels, which in turn can help workers maintain awareness of risk factors in their surroundings (Tee et al., Citation2017). In our post-experiment survey, multiple subjects commented on how the Stimulating mode required them to be “aware/alert about where boxes may end up,” creating “more excitement” or a “more engaging experience” in comparison to the Assistive policy. A few participants stated that the Assistive variant was “more convenient/artificial,” whereas the Stimulating mode was “more random,” as one would expect from their respective designs. reinforces these remarks by demonstrating that most experiment participants (9 of the 16) claimed to be “more alert” during the Stimulating handover strategy. There were mixed results reported by subjects on their perceived workload (NASA-TLX), preference, and frustration, as portrayed in .
Table 4. Subjective questionnaire responses, with total NASA-TLX scores (Hart & Staveland, Citation1988), preference, alertness, and frustration choices indicated by experiment mode.
5. Discussion
5.1. Overview
The robot-to-human handover study presented here builds on our prior work (Zolotas et al., Citation2022) by further investigating the ergonomic benefits of incorporating a “stimulating” control policy into the human-robot collaboration. A cobot was developed to employ such a policy by selecting OTPs with random patterns, under certain BoS constraints, hence injecting variability into the human receiver’s motion. Motivated by ergonomics studies that reported results in favor of enabling variability in the workplace, we hypothesized that a robot handover policy capable of stimulating human receiver movement would yield improvements in posture (Stapley et al., Citation1999; Mathiassen et al., Citation2003; Srinivasan & Mathiassen, Citation2012). In contrast, a traditional Assistive handover policy focused on maintaining a receiver’s CoM to be within their BoS would restrict motor variability and adversely impact human posture.
To test our main hypotheses on how Stimulating and Assistive handover policies would affect a receiver’s kinematic posture and dynamic movement, subjects performed multiple handovers with the cobot in order to imitate multiple work cycles. As anticipated, the Stimulating control mode heightened receiver’s motion dynamics, with significantly larger maximum torso rotation angles (68.73°) and CoM velocities (0.9 m/s) than those in the Assistive condition (63.54° and 0.34 m/s for torso rotation and velocity, respectively). demonstrates this heightened motion pattern across two consecutive handovers of each control mode for a specific subject. In general, we observed that participants spread out across a greater proportion of the handover zone under the Stimulating policy.
Figure 6. Illustration of the difference between two consecutive handover exchanges using the Assistive mode (top row) and Stimulating mode (bottom row). Less constrained motion is depicted when using the Stimulating mode, where the center of mass displacement is clearly of greater magnitude across the two selected handovers.
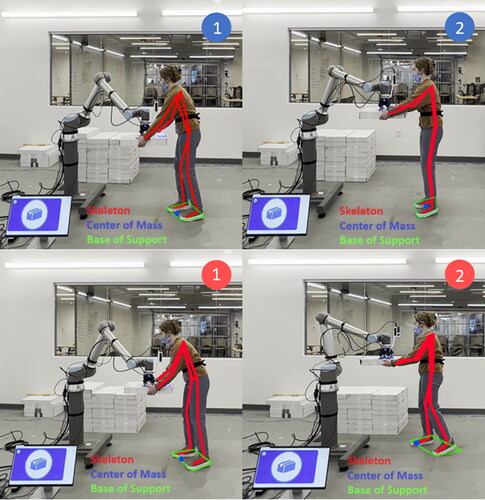
Of major importance to our experiment is the exploration of ergonomics indicators on postural risk factors. The Stimulating methodology significantly improved ergonomics scores by a mean difference of 0.26 in the REBA scale. However, there were no significant effects on the balance stability margin indicator, with a mean score of 8.91 for Stimulating than 8.44 in Assistive. While a 0.26 difference in REBA scores is only slight, the OTPs generated by the Stimulating mode also exhibited less “high risk” postural states for approximately 5% of the trial than those recorded for Assistive runs (). One might also argue that motion variability helped prevent subjects from losing attention, thus evading sloppy postural awareness. This argument was reinforced by six more participants choosing the Stimulating policy as “more alert” than the Assistive condition ().
Despite the potential benefits of the Stimulating handover method, it is worth highlighting a few open research questions regarding the experimental findings. Most notably, aggregating an instantaneous kinematic-based ergonomic metric, like REBA, over repeated interactions does not necessarily capture risk factors dependent on the task duration, repetitiveness, and past activities (Merlo et al., Citation2023). Therefore, future work should re-calibrate the experiment to investigate an appropriate kinematics “wear” index (Merlo et al., Citation2023), as well as scrutinize further the dynamics risk factors on ergonomics, e.g., overloading forces when exchanging objects (Maurice et al., Citation2017). Our findings on jerk in CoM may also hint at the adverse impact on smoothness of the Stimulating handover method, given jerk measures are frequently utilized in discerning movement fluency (Hogan & Sternad, Citation2009). Future adaptations to the proposed handover policy will need to consider techniques for selecting random OTPs around the BoS that will prevent constrained receiver motion while simultaneously reducing jerk. This objective falls in line with the desire to strike a balance between enforcing constraints on operations in the workplace and allowing variability (Ajoudani et al., Citation2018; Zare et al., Citation2018).
5.2. Implications for Human-Robot Collaboration
The work presented here has several implications for stakeholders of ergonomic human-robot collaboration. For instance, the current findings reinforce the possible risks of overassistance (Parasuraman et al., Citation2007; Onnasch et al., Citation2014) when cobots choose OTPs that keep human posture fixed or unvaried. The robotics community should thus be cautious about developing collaborative frameworks that impose a stabilizing policy on human motion. Additionally, ergonomics practitioners within the robotics domain should transition from single work cycle evaluations of the human-robot collaboration toward longitudinal studies composed of multiple work cycles. This will be integral in uncovering novel ergonomic indicators that possess a temporal nature and are only applicable to longer time scales (Merlo et al., Citation2023).
The concept of deliberately introducing “stimulus” into the physical collaboration extends beyond the scope of robot-to-human handover, as can be demonstrated by drawing connections to other robotics domains focused on user development, such as rehabilitation robots. In rehabilitation robotics, assist-as-needed controllers challenge a user by dynamically adjusting the robot’s behavior to encourage motor learning, engagement, and overall betterment (Rauter et al., Citation2011; Pehlivan et al., Citation2017). Many robotic tools have been developed to purposefully challenge the subject, such as by disturbing their posture (Peshkin et al., Citation2005) or by generating a stumbling-like response (Schmidt et al., Citation2005). Some studies have shown that, when applied in a controlled setting, counteracting force perturbations can even lead to improved reactions for loss of balance (Matjačić et al., Citation2018; Olensek et al., Citation2018). In essence, the purpose for many cobots is to provide “conditional assistance” as opposed to overassistance (Parasuraman et al., Citation2007; Demiris, Citation2009; Onnasch et al., Citation2014). Consequently, we believe that cobots can indirectly improve ergonomics in occupational settings by relying on the human worker’s adaptive capabilities under exposure to stimulating behavior strategies, rather than by directly optimizing instantaneous ergonomic metrics.
5.3. Future Research
Various research avenues can be envisioned from the presented cobot framework. In robot-to-human handover, ensuing experiments should analyze varying package weights or recruit a more diverse subject pool with a wider demographic that is representative of the entire workforce. While MSDs are more prevalent in older workforces, they are also a significant concern for younger workers (Summers et al., Citation2015). Furthermore, no task performance metric was considered when gauging productivity in the handover study. Completion times could not be evaluated as the robot’s generated trajectories were conditioned on the control mode, thereby influencing timing. As a result, future work must assess the impact of “stimulating” robot behavior on both a task-dependent cue for performance (e.g., time-to-completion, accuracy, efficiency) and the human’s ergonomic state (e.g., body posture).
Beyond handover collaborations, transparency could also be established in later extensions of the proposed framework, whereby the cause and reason for unpredictable or random robot behavior is made apparent to a user (Kim & Hinds, Citation2006; Ajoudani et al., Citation2018). This will prove essential in addressing subjects’ feedback on the Stimulating variant’s “randomness” as being “too inconsistent” or “harder to predict.” It may also alleviate the significant jerkiness in receiver motion found for this handover method. Fostering transparency could be attained through feedback interfaces that visualize the robot’s internal models of reasoning (Zolotas & Demiris, Citation2019), for example by visually portraying the robot’s planned handover trajectory. A final direction of research is to better formalize methods of detecting overassistance in real-time, which will likely require ergonomic indicators suitable for assessing multiple work cycles to be defined (Merlo et al., Citation2023). These indicators will then become cost functions for a new suite of optimization problems to circumvent repetitiveness in the workplace.
6. Conclusions
We interrogated the role of motor variability in enhancing the ergonomics of physical human-robot collaboration. A specific use-case was presented for robot-to-human handover, where two control policies were compared in terms of subjects’ motion dynamics, posture, and subjective perceptions. By employing a robot handover policy that selected OTPs to “stimulate” rather than restrict human receivers’ movement, with the latter being a typical byproduct of an “overassistive” policy, we observed significantly higher ergonomics indicator scores on body posture and a trend toward better balance margins. Prior findings from research driven by augmenting long-term factors of wellbeing, such as studies on variability in the workplace, were also discussed as a source of inspiration for our cobot’s handover policy design. These findings combined with the positive results on posture and balance from our handover experiment suggest that a shift from optimization-based approaches, which constrain human behavior, is necessary for human-robot collaboration in occupational settings.
Conflict of interest
The authors declare no conflict of interest.
Correction Statement
This article has been corrected with minor changes. These changes do not impact the academic content of the article.
Additional information
Funding
References
- Ajoudani, A., Zanchettin, A. M., Ivaldi, S., Albu-Schäffer, A., Kosuge, K., & Khatib, O. (2018). Progress and prospects of the human–robot collaboration. Autonomous Robots, 42(5), 957–975. https://doi.org/10.1007/s10514-017-9677-2
- Bazarevsky, V., Grishchenko, I., Raveendran, K., Zhu, T., Zhang, F., & Grundmann, M. (2020). Blazepose: On-device real-time body pose tracking. arXiv Preprint arXiv, 2006, 10204.
- Busch, B., Maeda, G., Mollard, Y., Demangeat, M., & Lopes, M. (2017). Postural optimization for an ergonomic human-robot interaction. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 2778–2785). IEEE.
- Commissaris, D. A., Toussaint, H. M., & Hirschfeld, H. (2001). Anticipatory postural adjustments in a bimanual, whole-body lifting task seem not only aimed at minimising anterior–posterior centre of mass displacements. Gait & Posture, 14(1), 44–55. https://doi.org/10.1016/s0966-6362(01)00098-4
- Demiris, Y. (2009). Knowing when to assist: Developmental issues in lifelong assistive robotics [Paper presentation]. Annual International Conference of the IEEE Engineering in Medicine and Biology Society (pp. 3357–3360). IEEE. https://doi.org/10.1109/IEMBS.2009.5333182
- Dupont, F., Léger, P. M., Begon, M., Lecot, F., Sénécal, S., Labonté-Lemoyne, E., & Mathieu, M. E. (2019). Health and productivity at work: Which active workstation for which benefits: A systematic review. Occupational and Environmental Medicine, 76(5), 281–294. https://doi.org/10.1136/oemed-2018-105397
- Eng, J. J., & Winter, D. A. (1993). Estimations of the horizontal displacement of the total body centre of mass: Considerations during standing activities. Gait & Posture, 1(3), 141–144. https://doi.org/10.1016/0966-6362(93)90055-6
- Fortini, L., Lorenzini, M., Kim, W., De Momi, E., & Ajoudani, A. (2020). A framework for real-time and personalisable human ergonomics monitoring. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 11101 – 11107.). IEEE.
- Franklin, C. S., Dominguez, E. G., Fryman, J. D., & Lewandowski, M. L. (2020). Collaborative robotics: New era of human–robot cooperation in the workplace. Journal of Safety Research, 74, 153–160. https://doi.org/10.1016/j.jsr.2020.06.013
- Gihleb, R., Giuntella, O., Stella, L., & Wang, T. (2022). Industrial robots, workers’ safety, and health. Labour Economics, 78, 102205. https://doi.org/10.1016/j.labeco.2022.102205
- Hart, S. G., & Staveland, L. E. (1988). Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. In Advances in psychology (Vol. 52, pp. 139–183). North-Holland.
- Hignett, S., & McAtamney, L. (2000). Rapid entire body assessment (REBA). Applied Ergonomics, 31(2), 201–205. https://doi.org/10.1016/s0003-6870(99)00039-3
- Hogan, N., & Sternad, D. (2009). Sensitivity of smoothness measures to movement duration, amplitude, and arrests. Journal of Motor Behavior, 41(6), 529–534. https://doi.org/10.3200/35-09-004-RC
- Kim, T., & Hinds, P. (2006). Who should I blame? Effects of autonomy and transparency on attributions in human-robot interaction. In IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN) (pp. 80–85). IEEE.
- Kim, W., Lorenzini, M., Balatti, P., Wu, Y., & Ajoudani, A. (2019). Towards ergonomic control of collaborative effort in multi-human mobile-robot teams. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 3005 – 3011). IEEE.
- Luttmann, A., Jager, M., Griefahn, B., Caffier, G., & Liebers, F. (2003). Preventing musculoskeletal disorders in the workplace.
- Madeleine, P., Voigt, M., & Mathiassen, S. E. (2008). The size of cycle-to-cycle variability in biomechanical exposure among butchers performing a standardised cutting task. Ergonomics, 51(7), 1078–1095. https://doi.org/10.1080/00140130801958659
- Mathiassen, S. E., Möller, T., & Forsman, M. (2003). Variability in mechanical exposure within and between individuals performing a highly constrained industrial work task. Ergonomics, 46(8), 800–824. https://doi.org/10.1080/0014013031000090125
- Matjačić, Z., Zadravec, M., & Olenšek, A. (2018). Feasibility of robot-based perturbed-balance training during treadmill walking in a high-functioning chronic stroke subject: A case-control study. Journal of Neuroengineering and Rehabilitation, 15(1), 32. https://doi.org/10.1186/s12984-018-0373-z
- Maurice, P., Padois, V., Measson, Y., & Bidaud, P. (2017). Human-oriented design of collaborative robots. International Journal of Industrial Ergonomics, 57, 88–102. https://doi.org/10.1016/j.ergon.2016.11.011
- Merlo, E., Lamon, E., Fusaro, F., Lorenzini, M., Carfì, A., Mastrogiovanni, F., & Ajoudani, A. (2023). An ergonomic role allocation framework for dynamic human–robot collaborative tasks. Journal of Manufacturing Systems, 67, 111–121. https://doi.org/10.1016/j.jmsy.2022.12.011
- Olensek, A., Zadravec, M., Rudolf, M., Humar, M. G., Tomsic, I., Bizovicar, N., Goljarm, N., & Matjačić, Z. (2018). A novel approach to robot-supported training of symmetry, propulsion and balance during walking after stroke: A case study. In IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob) (pp. 408 – 413). IEEE.
- Onnasch, L., Wickens, C. D., Li, H., & Manzey, D. (2014). Human performance consequences of stages and levels of automation: An integrated meta-analysis. Human Factors, 56(3), 476–488. https://doi.org/10.1177/0018720813501549
- Ortenzi, V., Cosgun, A., Pardi, T., Chan, W. P., Croft, E., & Kulic, D. (2021). Object handovers: A review for robotics. IEEE Transactions on Robotics, 37(6), 1855–1873. https://doi.org/10.1109/TRO.2021.3075365
- Parastegari, S., Abbasi, B., Noohi, E., & Zefran, M. (2017). Modeling human reaching phase in human-human object handover with application in robot-human handover. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 3597 – 3602). IEEE.
- Parasuraman, R., Barnes, M., Cosenzo, K., & Mulgund, S. (2007). Adaptive automation for human-robot teaming in future command and control systems. The International C2 Journal, 1(2), pp.43–68.
- Parasuraman, R., & Riley, V. (1997). Humans and automation: Use, misuse, disuse, abuse. Human Factors: The Journal of the Human Factors and Ergonomics Society, 39(2), 230–253. https://doi.org/10.1518/001872097778543886
- Pehlivan, A. U., Losey, D. P., Rose, C. G., & O’Malley, M. K. (2017). Maintaining subject engagement during robotic rehabilitation with a minimal assist-as-needed (mAAN) controller [Paper presentation]. In International Conference on Rehabilitation Robotics (ICORR) (pp. 62 – 67). IEEE. https://doi.org/10.1109/ICORR.2017.8009222
- Peshkin, M., Brown, D. A., Santos-Munné, J. J., Makhlin, A., Lewis, E., Colgate, J. E., Patton, J., & Schwandt, D. (2005). KineAssist: A robotic overground gait and balance training device. In International Conference on Rehabilitation Robotics (ICORR) (pp. 241 – 246). IEEE.
- Peternel, L., Kim, W., Babič, J., & Ajoudani, A. (2017, November). Towards ergonomic control of human-robot co-manipulation and handover [Paper presentation]. 2017 IEEE-RAS 17th International Conference on Humanoid Robotics (Humanoids) (pp. 55 – 60). IEEE. https://doi.org/10.1109/HUMANOIDS.2017.8239537
- Plagenhoef, S., Evans, F. G., & Abdelnour, T. (1983). Anatomical data for analyzing human motion. Research Quarterly for Exercise and Sport, 54(2), 169–178. https://doi.org/10.1080/02701367.1983.10605290
- Punnett, L., & Wegman, D. H. (2004). Work-related musculoskeletal disorders: The epidemiologic evidence and the debate. Journal of Electromyography and Kinesiology: Official Journal of the International Society of Electrophysiological Kinesiology, 14(1), 13–23. https://doi.org/10.1016/j.jelekin.2003.09.015
- Rauter, G., Sigrist, R., Marchal-Crespo, L., Vallery, H., Riener, R., & Wolf, P. (2011). Assistance or challenge? Filling a gap in user-cooperative control. In IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 3068 – 3073.). IEEE.
- Sarbat, I., & Ozmehmet Tasan, S. (2022). Ergonomics indicators: A proposal for sustainable process performance measurement in ergonomics. Ergonomics, 65(1), 3–38. https://doi.org/10.1080/00140139.2021.1953614
- Schmidt, H., Hesse, S., Bernhardt, R., & Krüger, J. (2005). HapticWalker – A novel haptic foot device. ACM Transactions on Applied Perception, 2(2), 166–180. https://doi.org/10.1145/1060581.1060589
- Schneider, E., Copsey, S., & Irastorza, X. (2010). OSH [Occupational safety and health] in figures: Work-related musculoskeletal disorders in the EU-facts and figures. Office for Official Publications of the European Communities.
- Shafti, A., Ataka, A., Lazpita, B. U., Shiva, A., Wurdemann, H. A., & Althoefer, K. (2019). Real-time robot-assisted ergonomics. In International Conference on Robotics and Automation (ICRA) (pp. 1975 – 1981). IEEE.
- Shaham, M. H., Skopin, M., Hochsztein, H., Mabulu, K., Milburn, L., Tukpah, J., Tunik, A., Winn, J., Zolotas, M., Erdoğmuş, D., & Padır, T. (2022). Human-supervised automation test cell to accelerate personal protective equipment manufacturing during the COVID-19 pandemic. In IEEE International Symposium on Technologies for Homeland Security (HST) (pp. 1 – 8). IEEE.
- Srinivasan, D., & Mathiassen, S. E. (2012). Motor variability in occupational health and performance. Clinical Biomechanics (Bristol, Avon), 27(10), 979–993. https://doi.org/10.1016/j.clinbiomech.2012.08.007
- Stapley, P. J., Pozzo, T., Cheron, G., & Grishin, A. (1999). Does the coordination between posture and movement during human whole-body reaching ensure center of mass stabilization? Experimental Brain Research, 129(1), 134–146. https://doi.org/10.1007/s002210050944
- Summers, K., Jinnett, K., & Bevan, S. (2015). Musculoskeletal disorders, workforce health and productivity in the United States. The center for workforced health and performance. Lancaster University.
- Tee, K. S., Low, E., Saim, H., Zakaria, W. N. W., Khialdin, S. B. M., Isa, H., Awad, M. I., & Soon, C. F. (2017). A study on the ergonomic assessment in the workplace. In AIP Conference Proceedings, 1883(1): 020034–1–020034-11.
- van der Spaa, L., Gienger, M., Bates, T., & Kober, J. (2020). Predicting and optimizing ergonomics in physical human-robot cooperation tasks. In IEEE International Conference on Robotics and Automation (ICRA) (pp. 1799 – 1805). IEEE.
- Watson, F., Fino, P. C., Thornton, M., Heracleous, C., Loureiro, R., & Leong, J. J. (2021). Use of the margin of stability to quantify stability in pathologic gait–a qualitative systematic review. BMC Musculoskeletal Disorders, 22(1), 597. https://doi.org/10.1186/s12891-021-04466-4
- Zare, M., Sagot, J. C., & Roquelaure, Y. (2018). Within and between individual variability of exposure to work-related musculoskeletal disorder risk factors. International Journal of Environmental Research and Public Health, 15(5), 1003. https://doi.org/10.3390/ijerph15051003
- Zolotas, M., & Demiris, Y. (2019). Towards explainable shared control using augmented reality. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 3020 – 3026). IEEE.
- Zolotas, M., Luo, R., Bazzi, S., Saha, D., Mabulu, K., Kloeckl, K., & Padır, T. (2022). Productive inconvenience: Facilitating posture variability by stimulating robot-to-human handovers. In IEEE International Conference on Robot and Human Interactive Communication (RO-MAN) (pp. 122–128). IEEE.